










VLA 연구, 유팩토리 xArm 6 협동로봇이 표준이 된 이유
2분11859
[유팩토리 xArm 6로 VLA 포함한 Physical AI 연구를 진행하고 있는 KAIST IRiS Lab]
1년 전만 해도 30편 수준이었던 분야가 1년 만에 5배 이상 커졌습니다. KAIST 소프트웨어대학원 세미나와 알고리즘 지능 연구실 강의에도 VLA가 정식 편입되었고, 국내 피지컬 AI 스타트업의 채용 공고에도 'VLA 모델 학습 경험'이 빠르게 등장하고 있죠.
그런데 막상 VLA 연구를 시작하려는 연구자가 가장 먼저 부딪히는 질문은 의외로 단순합니다. "어떤 로봇팔로 실험을 시작해야 하지?" 이 글은 VLA 개념 → 데이터 수집의 중요성 → 글로벌 연구가 유팩토리 xArm 6를 선택하는 이유 → 도입 체크리스트까지, 연구실 현장에서 실제로 필요한 정보 순서대로 정리했습니다.
VLA(Vision-Language-Action) 모델이란?
보고, 이해하고, 행동하는 단일 AI
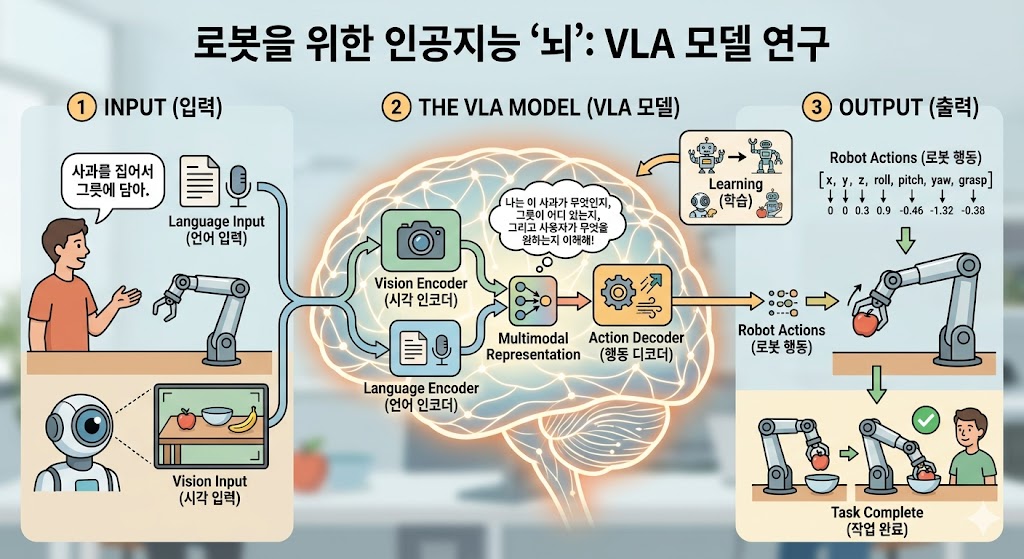
VLA는 Vision(시각) · Language(언어) · Action(행동) 세 가지 모달리티를 하나의 모델 안에서 처리하는 인공지능입니다. 카메라로 들어오는 이미지와 "빨간 컵을 싱크대에 넣어줘" 같은 자연어 지시를 입력으로 받아, 곧바로 로봇 모터를 움직이는 명령(액션)까지 한 번의 forward pass에서 출력하죠. 지각 모듈 → 계획 모듈 → 제어 모듈을 따로 만들어 연결하던 기존 방식과 본질적으로 다른 구조입니다.
핵심 개념 중 하나가 액션 토큰(Action Token)이에요. LLM이 단어를 토큰으로 다루는 것처럼, VLA는 그리퍼 상태와 end-effector의 x·y·z 좌표·회전을 토큰화해 다룹니다. 다만 LLM의 function calling 토큰과 본질이 달라요. VLA의 액션 토큰은 실제로 액추에이터를 통해 물리 세계를 바꾸기 위한 토큰이라는 점에서 무게감이 다릅니다.
Vision-Language Model에 액션 출력 모달리티를 더한 첫 신호탄. 웹 지식과 로봇 시연을 함께 학습한 최초의 통합 모델.
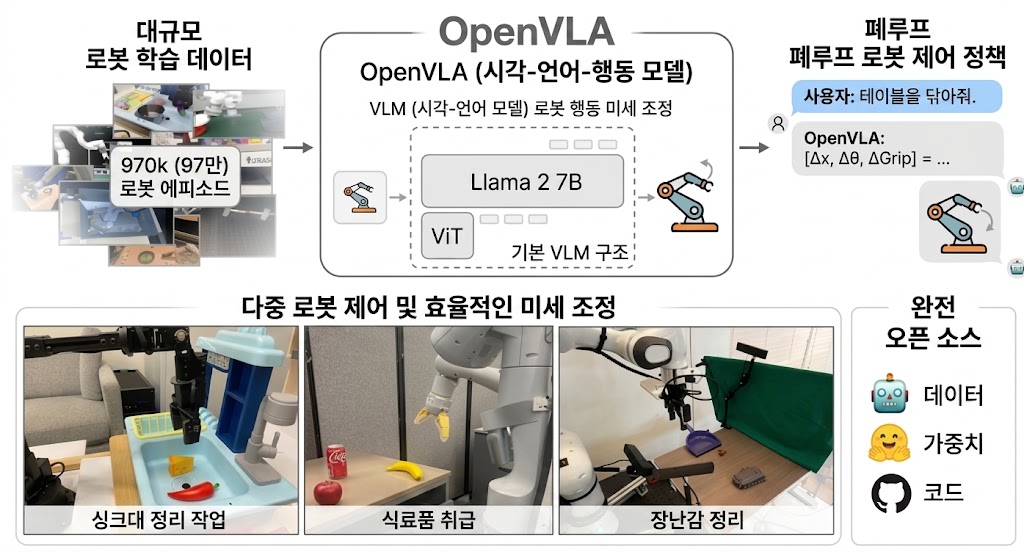
2024년 — Stanford·MIT의 OpenVLA
7B 파라미터, 97만 시연 데이터로 학습된 오픈소스 표준. 닫힌 모델인 RT-2-X(55B)를 16.5%p 능가하면서도 파라미터는 7배 적음.
2025~2026년 — π0(FAST), TinyVLA, SmolVLA, Gemini Robotics
경량화·확산 디코더·추론 가속(Latent Reasoning) 등 다양한 갈래로 분화. 2026년 1월에만 BayesianVLA, ACoT-VLA, DynamicVLA, Fast-ThinkAct 등 신규 논문이 쏟아져 나오는 중.
정리하면, VLA는 "AI for screen(LLM)" 다음 단계인 "AI for the real world"입니다. 글을 읽고 쓰는 AI에서, 카메라로 보고 손으로 움직이는 AI로의 전환이죠. 이 흐름이 폭발하면서, 지금 학계와 산업계의 가장 큰 화두는 "어떻게 좋은 모델을 만들까"가 아니라 "어떻게 좋은 데이터를 모을까"로 옮겨가고 있습니다.
마로솔이 연구실 환경·예산에 맞는 셋업을 1:1로 제안해 드려요.
VLA 연구의 진짜 병목
모델이 아니라 '하드웨어와 데이터'
VLA가 LLM과 결정적으로 다른 점은 "학습 데이터를 인터넷에서 긁어올 수 없다"는 것입니다. 비전·언어 데이터는 웹에 무한히 쌓여 있지만, 액션 데이터는 오직 실제 로봇이 움직인 시연(demonstration)으로만 만들어져요. OpenVLA가 97만 건의 시연으로 학습됐지만, 새로운 태스크에 fine-tuning하려면 결국 연구실에서 직접 시연 데이터를 수집해야 합니다.
그래서 VLA 연구실의 첫 번째 의사결정은 모델이 아니라 "어떤 로봇팔로 데이터를 모을까"입니다. 한번 결정하면 데이터셋·코드·재현 실험이 모두 그 하드웨어에 묶이기 때문에, 사실상 연구의 출발점이자 가장 오래 가는 인프라가 되죠.
그리고 흥미로운 현상이 일어납니다. 연구자들이 "앞 논문이 쓴 로봇을 따라가는" 패턴이 강하게 나타나요. Open X-Embodiment 같은 공개 데이터셋과의 호환성, 논문 비교·재현의 용이성 때문이죠. 그 결과 최근 1년 사이 글로벌 VLA 논문에서 등장 빈도가 가파르게 올라간 모델이 바로 유팩토리(UFACTORY) xArm 6입니다.
 유팩토리 xArm 6가 OpenVLA 생태계에서 주목받는 이유는 뛰어난 가성비와 유연성 덕분입니다. 복잡한 환경을 구축하지 않아도, 다양한 엔드 이펙터(End-effector)와 도구를 결합해 즉각적인 연구 결과를 도출할 수 있기 때문입니다.
유팩토리 xArm 6가 OpenVLA 생태계에서 주목받는 이유는 뛰어난 가성비와 유연성 덕분입니다. 복잡한 환경을 구축하지 않아도, 다양한 엔드 이펙터(End-effector)와 도구를 결합해 즉각적인 연구 결과를 도출할 수 있기 때문입니다.
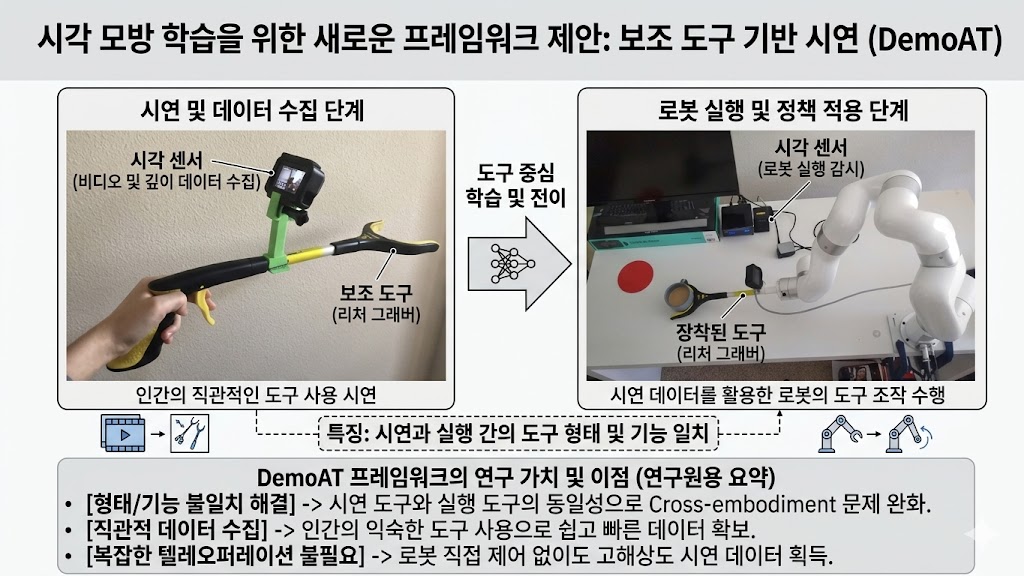
실제로 시각 모방 학습 연구에 xArm 6가 어떻게 활용되고 있는지 아래 DemoAT 연구 사례를 통해 확인할 수 있습니다. 값비싼 로봇 손(Dexterous hand) 대신 일상적인 집게 도구와 xArm 6를 결합하여 성공적으로 모델을 학습시킨 모습입니다.
Object-Agent-centric Tokenization for VLAs. xArm 6를 흰색 테이블탑 환경에 배치해 320개 trajectory 데이터셋을 수집하고, OpenVLA 대비 학습 속도를 2배 가까이 끌어올린 결과를 검증.
VLA-Pruner (arXiv 2511.16449, 2025년 11월)
Temporal-Aware Visual Token Pruning. 6-DoF xArm6에 패러렐 그리퍼를 장착해 캔 적층, 컵 따르기, 큐브·보틀 배치 등 4종 manipulation 태스크를 100회씩 시도한 실세계 평가로 75% 토큰 프루닝에서도 성능 보존을 입증.
국내 흐름 — KAIST 외
KAIST 소프트웨어대학원 세미나(Deep Video Understanding with Foundation Models, 2025년 10월)와 알고리즘 지능 연구실의 AI602 강의에서 VLA가 정식 커리큘럼으로 다뤄지며, 국내에서도 본격적인 도입 검토가 시작.
즉, xArm 6가 갑자기 인기를 얻은 게 아니에요. "VLA 한다 → 어떤 로봇으로 시작? → 논문에서 본 그 로봇 → xArm 6"라는 검색·구매 여정이 글로벌 연구 커뮤니티에서 자연스럽게 형성된 결과입니다. 그렇다면 이 로봇은 정확히 어떤 스펙과 강점을 가지고 있을까요.
유팩토리 xArm 6
VLA 연구를 위한 핵심 스펙 풀 가이드

📋 한 눈에 보는 xArm 6 핵심 스펙
하드웨어 내부도 연구용으로 의미 있게 설계됐어요. 외전형 BLDC 모터 + 하모닉 드라이브 + 17-bit multi-turn 절대 인코더 조합으로 정밀도와 내구성을 잡고, 충돌 감지가 내장되어 사람 옆에서 데이터 수집 작업을 안전하게 진행할 수 있습니다. 컨트롤 박스에는 X86 칩이 들어가 제어 알고리즘을 자체 처리하기 때문에, 외부 PC 부담도 줄어들죠.
소프트웨어 측면이 연구자에게 가장 중요한 포인트입니다. 컨트롤 박스 내부에 UFACTORY Studio라는 웹 기반 GUI 플랫폼이 들어 있어, 별도 설치 없이 브라우저로 접속해 첫 모션을 5분 안에 만들 수 있어요. 동시에 오픈소스 GitHub API가 공개되어 있어 Python·C++·MATLAB·ROS2로 직접 제어가 가능합니다. OpenVLA·π0 코드를 그대로 가져와 학습 파이프라인을 붙이는 흐름이 자연스럽게 만들어지는 구조죠.
🎯 글로벌 VLA 연구실이 xArm 6를 선택하는 4가지 이유
- 01재현성(Reproducibility): Oat-VLA·VLA-Pruner 등 주요 논문이 동일 모델을 벤치마크 셋업으로 사용. "논문 결과를 똑같이 재현해 보고 싶다"는 연구자에게 가장 안전한 선택.
- 02개방성(Openness): ROS·ROS2 공식 지원 + 오픈소스 API. 학습 파이프라인을 자유롭게 커스터마이징할 수 있어 VLA 알고리즘 변경·실험 반복이 빠릅니다.
- 03합리적 가격(Cost-efficiency): 동급 6축 협동로봇(UR3e, Franka Panda 등) 대비 약 1/2 수준의 도입 비용. 연구실 1대가 아니라 2~3대로 듀얼암·멀티에이전트 실험까지 확장 가능.
- 04확장성(Scalability): ±0.1mm 정밀도 + 5kg 페이로드 + 12.2kg 경량. tabletop manipulation부터 모바일 베이스 탑재 loco-manipulation까지 동일 모델로 커버.
마로솔에서 셋업·그리퍼·예산까지 1:1 컨설팅을 받아보세요.
도입 전 체크리스트 —
연구실이 자주 빠뜨리는 6가지 포인트
로봇팔 본체 스펙만 보고 결정하는 연구실이 의외로 많지만, 실제로 첫 데이터셋을 수집하기까지 발목을 잡는 건 주변기기·셋업·소프트웨어입니다. 마로솔이 다양한 연구실 도입을 지원하면서 가장 자주 본 6가지 체크 포인트를 정리했어요.
- 01그리퍼 호환성: 순정 xArm Gripper, 진공 그리퍼, 외부 Robotiq 2F-85 등 옵션이 다양합니다. OpenVLA 데이터셋 호환을 노린다면 패러렐 그리퍼가 무난하지만, 부드러운 물체 조작 연구라면 진공·소프트 그리퍼 조합도 고려.
- 02외부 카메라 마운트: RealSense D435 / D455의 마운트 위치가 데이터 품질을 좌우합니다. 3rd-person view + wrist-mounted view 듀얼 구성이 최근 VLA 논문 표준. 마운트 브래킷은 3D 프린팅으로도 가능.
- 03학습 PC 사양: OpenVLA 7B fine-tuning 기준 RTX 4090 또는 A6000 이상 권장. LoRA·양자화 활용 시 컨슈머 GPU에서도 충분합니다. 데이터 수집 PC와 학습 PC를 분리하면 워크플로우가 훨씬 깔끔.
- 04ROS 버전 결정: ROS2 Humble 또는 Iron 권장. Isaac Sim·MoveIt2와의 호환성을 미리 확인하고, ROS1 레거시 코드가 있다면 ros1_bridge 활용 계획까지 함께 결정하세요.
- 05안전 펜스·작업 공간: 700mm 작업 반경 + 시연자 자세 + 카메라 시야각을 고려한 최소 1.5m × 1.5m 공간이 필요합니다. 충돌 감지가 내장돼 있어 펜스 의무는 아니지만, 데이터 일관성을 위해 조명·배경을 통제할 수 있는 부스 형태를 추천.
- 06A/S 응답 속도와 부품 수급: 본사 직거래 시 통관 리드타임이 평균 4주, 부품 교체도 해외 발송 대기가 발생합니다. 국내 파트너를 통한 도입이 정부 R&D 과제 일정 측면에서 훨씬 안정적이에요.
이 6가지 중 2개 이상이 처음 듣는 이야기라면, 도입 전 전문가와 한 번 점검하는 시간을 갖는 게 좋습니다. 셋업 단계에서 새는 시간이 결국 논문 마감과 과제 일정을 흔들거든요.

폴리텍대학교 교수님께 연구용 협동로봇 사용법을 공유해주고 있는 마로솔 로봇전문가
마로솔 이지케어 —
연구실에 최적화된 도입·운영 지원
마로솔은 단순히 xArm 6를 판매만 하는 곳이 아니에요. 토탈 로봇 솔루션 플랫폼으로서, 연구실이 첫 데이터 수집까지 가장 빠르게 도달할 수 있도록 도입·셋업·운영 전반을 함께 지원합니다.
- 01연구실 맞춤 견적·구성 제안: 연구 주제(VLA/이미테이션 러닝/모바일 매니퓰레이션)와 예산에 맞춰 본체·그리퍼·카메라·컨트롤 박스 구성을 1:1로 제안해 드려요.
- 02티칭·ROS 셋업 지원: 첫 모션부터 ROS2 통합·MoveIt2 환경 구성까지 엔지니어링 지원이 포함되어, 연구자는 알고리즘에만 집중할 수 있습니다.
- 03R&D 과제 대응: 정부 R&D 과제용 정량 견적서·세금계산서 발행이 가능하고, 일정 압박이 있는 과제에는 우선 출고 협의도 가능합니다.
- 041년 보증 + 풀타임 3년 검증: 본사 1년 보증에 더해, 최소 3년 풀타임 사용을 견딘 내구성. 연구실 워크로드에 적합한 검증된 신뢰성입니다.
정리하면, 마로솔이 제공하는 건 '협동로봇 한 대'가 아니라 'VLA 연구를 가장 빠르게 시작할 수 있는 인프라 패키지'입니다. 연구비를 아끼고 시간을 버는 가장 합리적인 출발점이라고 보시면 돼요.
자주 묻는 질문 —
연구자가 도입 전 가장 많이 묻는 5가지
xArm 7은 7축으로 여유롭지만 가격·복잡도가 올라가요. VLA 연구 표준 환경은 6축 + 5kg 페이로드가 가장 보편적이라, 논문 재현·데이터셋 호환 측면에서 xArm 6가 가장 안전한 선택입니다.
VLA는 더 이상 일부 톱티어 연구실의 화두가 아닙니다. ICLR 2026의 164편 논문, KAIST 강의, 국내 피지컬 AI 스타트업의 채용 공고 모든 신호가 "이제는 시작해야 할 때"를 가리키고 있어요.
그리고 이 흐름에 합류하는 가장 빠른 길은 명확합니다. 글로벌 연구가 이미 검증한 하드웨어로 시작하는 것. 그 출발점에 유팩토리 xArm 6와 마로솔이 함께 있습니다.
이 글을 읽은 분들이 아래의 포스팅을 좋아합니다
지금 이 로봇 가격 협의 가능!
회원님, 지금 문의하시면 도입 조건에 따라 추가 할인이 있을 수 있어요 💡