










아이작심 연구용 휴머노이드, 왜 애지봇 X2 울트라인가? (휴머노이드 환경 구축 지원)
논문 마감을 앞둔 연구실이 가장 자주 겪는 위기는 "로봇이 없어서"가 아닙니다. "환경 구축이 어려워서"입니다.
데이터 수집(텔레오퍼레이션) → 데이터 정리(LeRobot) → 로봇 시뮬레이션(아이작심·MuJoCo) → Sim-to-Real → 운영·A/S까지, 이 파이프라인 중 한 곳이라도 끊기면 실험의 반복성과 재현성이 무너지고 일정이 흔들립니다.
마로솔 휴머노이드 기술 자문 전문가에게 직접 물었습니다. 왜 애지봇 X2 울트라인지, 그리고 왜 마로솔 이지케어가 그 파이프라인을 완성하는 답인지를요.

연구실은 결국 논문으로 '증명'해야 하잖아요. 그래서 저는 첫 질문을 이렇게 바꿉니다. "이 로봇으로 어떤 실험 설계와 평가 지표를 안정적으로 반복할 수 있나?"라고요.
특히 휴머노이드는 보행/균형, 접촉, 전신 관절, 센서 동기화가 동시에 들어옵니다. 그래서 "한 번 돌려서 되는 로봇"이 아니라, 데이터→학습→검증을 몇 달 동안 계속 돌려도 안 멈추는지가 핵심입니다. 좋은 연구용 플랫폼의 기준은 스펙이 아니라 파이프라인입니다.
연구 파이프라인 흐름:
ROS2 · SDK/API · URDF→② 데이터 파이프라인
텔레오퍼레이션 · LeRobot→③ 시뮬레이션/검증
Isaac Sim · MuJoCo→④ 운영 · A/S
방문·원격 지원
2026년 1월, 글로벌 시장조사기관 Omdia가 발표한 '범용 Embodied AI 로봇 2026' 보고서에 따르면, 애지봇은 2025년 한 해 5,168대를 출하해 글로벌 점유율 39%로 세계 1위를 기록했습니다. Omdia는 8개 평가 차원 중 6개에서 애지봇에 최고 등급인 'Advanced Capability'를 부여했습니다.
2026년 1월, 글로벌 시장조사기관 Omdia가 발표한 보고서에 따르면, 애지봇은 2025년 한 해 5,168대를 출하해 글로벌 점유율 39%로 세계 1위를 기록했습니다. Omdia는 8개 평가 차원 중 6개에서 'Advanced Capability' 최고 등급을 부여했습니다.
연구용 관점에서 "이미 많이 깔린 로봇"이라는 사실은 무시하기 어렵습니다. 판매량이 많을수록 개발자 생태계·레퍼런스·운영 노하우가 빠르게 쌓이고, 선행 연구자들의 코드를 활용할 수 있는 가능성이 높아지기 때문입니다.
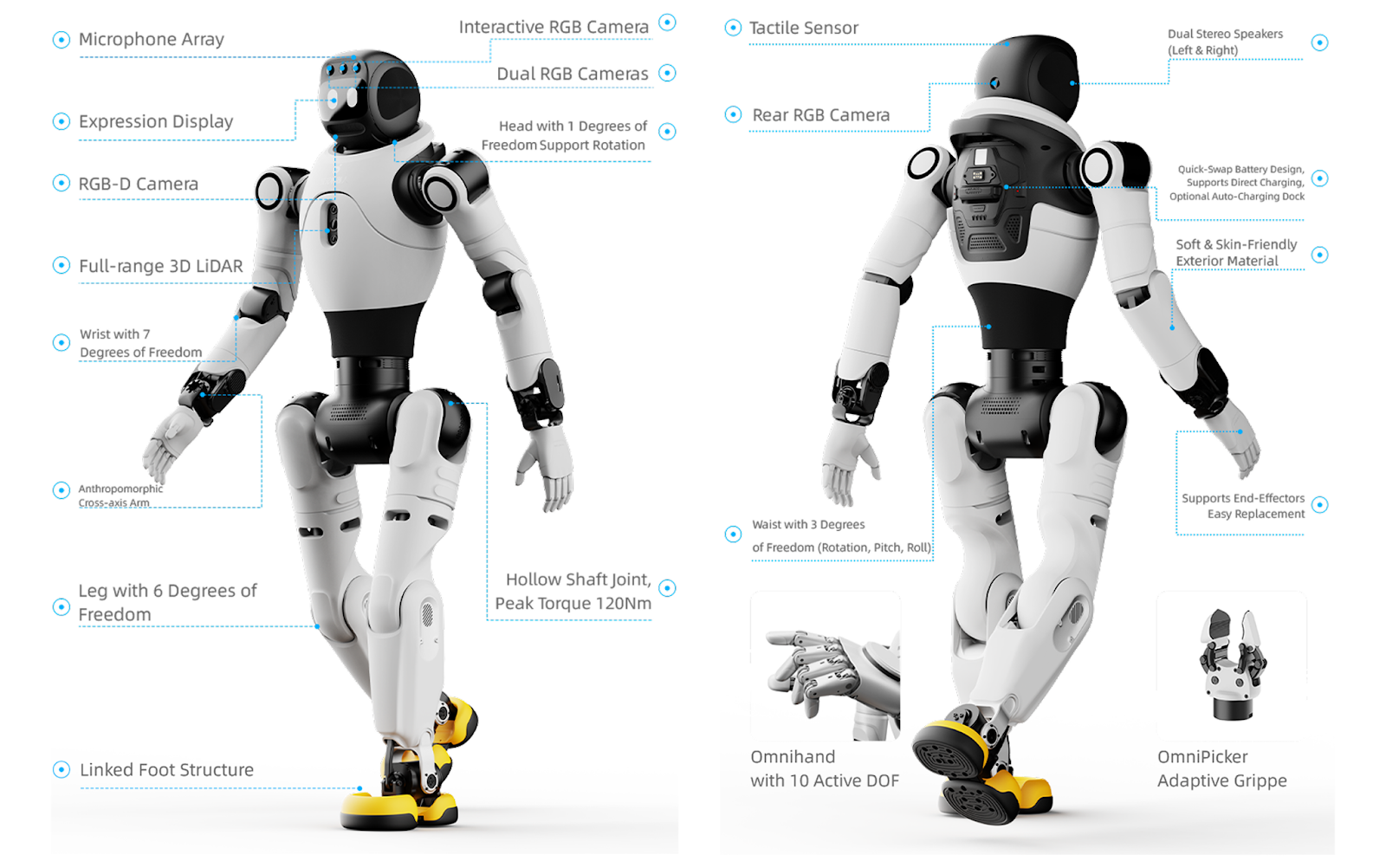
하드웨어는 "연구가 자주 부딪히는 축" 위주로 보시면 됩니다. 애지봇 공식 스펙 기준으로 X2 울트라는 신장 약 1.31m, 무게 약 39kg, 구동 DOF 30, 최대 속도 1.8m/s, 팔 페이로드 최대 3kg입니다.
센서는 전방 스테레오 RGB·후방 RGB·RGB-D·3D LiDAR 등 멀티비전+거리 센서를 한 세트로 묶었고, Wi-Fi/블루투스/4G·5G 모듈을 기본 포함해 원격 실험 확장이 유리합니다.
그리고 개발 환경에서 X2 울트라의 "연구용" 성격이 더 선명해집니다.
- ①AimDK(ROS2 기반): AimDK라는 ROS2 기반 개발 도구를 통해 연구자가 로봇 동작을 직접 제어하고 기능을 확장할 수 있고, Python과 C++를 모두 지원해 다양한 방식으로 실험을 진행할 수 있습니다.
- ②ROS2 인터페이스 문서화: 보행, 관절, 손 제어 같은 기능이 문서로 잘 정리돼 있어 처음 연구를 시작하는 입장에서도 접근하기 좋습니다.
- ③시뮬레이션 연결고리: URDF 기반 시뮬레이션 모델과 Isaac Sim·MuJoCo 지원이 더해져, 실제 로봇을 바로 쓰기 전에 가상환경에서 먼저 테스트하고 검증할 수 있다는 점도 큰 장점입니다.
모방학습(Imitation Learning)의 출발점은 결국 "좋은 시연 데이터"입니다. 그런데 휴머노이드는 과업이 복잡해서 데이터 수집 난도가 훨씬 높습니다. 그래서 연구·산업 전반에서 텔레오퍼레이션과 공유 자율성(Shared Autonomy) 접근이 빠르게 확산되고 있고, 다중 로봇 텔레오퍼레이션은 여전히 활발한 연구 주제로 남아 있습니다.
애지봇 X2 울트라는 스펙 자체가 텔레오퍼레이션 같은 원격 실험을 염두에 둔 흔적이 있습니다. 4G/5G 모듈이 기본 포함돼 Wi-Fi 밖 환경에서도 연결성을 확보할 수 있고, 5G용 SIM 슬롯, 모바일 앱 지원, OTA 업데이트 지원까지 갖춰 실험실 밖 복도·캠퍼스·공장 같은 현장으로 데이터 수집 반경을 넓히기 유리합니다.
LeRobotDataset은 로봇 학습용 표준 포맷으로, 상태·액션 같은 시계열 데이터는 Parquet로, 카메라 기반 비주얼 데이터는 MP4로 함께 관리할 수 있게 설계돼 있습니다. 덕분에 수집한 데이터를 이후 학습 파이프라인으로 넘기기 쉬워집니다. 또한 공식 문서에는 실로봇에서 텔레오퍼레이션으로 데이터를 기록하고, 이를 바탕으로 학습과 평가까지 이어가는 튜토리얼도 제공됩니다.
마로솔 이지케어가 여기서 의미 있는 이유는 툴들이 로봇과 단순히 '연동이 된다'는 수준을 넘어 연구자가 바로 데이터 수집과 학습을 시작할 수 있는 실행 가능한 연구 환경까지 만들어준다는 점입니다. LeRobot·Isaac Sim·MuJoCo·ROS2까지 초기 세팅을 지원하고, 텔레오퍼레이션→데이터 수집→LeRobot 정리→시뮬 검증까지를 한 흐름으로 제시합니다.
파이프라인 흐름:
SOLlink 미들웨어→LeRobot 포맷 변환→모방학습 베이스라인
BC / ACT→시뮬 보강
Isaac / MuJoCo→Sim-to-Real 배포
논문을 목표로 한다면 로봇 시뮬레이션은 "가능하면 거의 필수"에 가깝습니다. Sim-to-Real은 시뮬레이션에서 정책을 학습·검증한 뒤 실제로 옮길 때 생기는 현실 격차(reality gap)를 다루는 분야고, 도메인 랜덤화·도메인 적응 등의 방법론이 폭넓게 정리돼 있습니다. 특히 휴머노이드는 안전 비용이 커서 '실로봇에서 시행착오'가 너무 비쌉니다.
"같은 시뮬레이터"가 아니라, 연구 파이프라인에서 맡는 역할이 다릅니다.
- ①Isaac Sim(아이작심): 로봇 시뮬레이션·테스트·합성 데이터 생성을 위한 Omniverse 기반 프레임워크입니다. URDF 등 다양한 입력을 받아 USD로 변환해 씬을 구성하고, ROS2 워크플로/브리지를 통해 기존 ROS2 스택을 시뮬에서 검증하는 구조를 문서로 제공합니다. 대규모·고충실도·ROS2 통합·합성 데이터 생성에 강합니다.
- ②MuJoCo(무조코): 빠르고 정확한 접촉 물리 시뮬레이션이 필요한 로보틱스 연구를 목표로 하는 오픈소스 물리엔진입니다. 접촉·동역학 중심의 제어/학습 루프, 그리고 손가락 조작처럼 접촉이 많은 작업에 강합니다.
X2 울트라 연구를 시작할 때 가장 먼저 필요한 건 URDF입니다. URDF는 로봇을 컴퓨터 안에 그대로 옮겨놓기 위한 설계도라고 보면 됩니다. 팔이 어디에 붙어 있는지, 다리는 어떻게 꺾이는지, 관절이 얼마나 움직일 수 있는지 같은 정보를 먼저 맞춰두어야 시뮬레이션도 정확해집니다. 그다음 Isaac Sim(아이작심)에서 ROS2 연결을 점검하고, 이후 Isaac Lab(아이작랩)이나 MuJoCo(무조코)에서 학습을 반복하면, 실제 로봇에 올리기 전까지 연구 흐름을 훨씬 안정적으로 검증할 수 있습니다.
2단계 (환경구축): ROS2·SDK/API·텔레오퍼레이션·LeRobot 세팅
3단계 (시뮬/학습): Isaac Sim(아이작심)·MuJoCo(무조코)·Isaac Lab(아이작랩) 기반 정책 학습
4단계 (Sim-to-Real): 도메인 랜덤화·튜닝·안전 검증
5단계 (연구 운영): 반복 실험·논문화·유지보수·방문 A/S

핵심은 "세 가지 주요 연구가 공통된 인프라를 공유한다"는 점입니다.

마로솔이 초기 환경 세팅과 기술 자문을 패키지로 지원합니다.
사람의 관절 구조와 로봇의 관절 구조는 다릅니다. 자유도, 링크 길이, 관절 제한이 모두 달라서 사람 동작을 그대로 복사하면 깨집니다. 그래서 인간 동작을 로봇 제약에 맞게 최적화해 변환하는 Motion Retargeting이 필요하고, 최근에는 "리타게팅 품질이 정책 성능에 직접 영향을 준다"는 관점에서 이를 더 정교하게 다루는 흐름(예: GMR — General Motion Retargeting)이 주목받고 있습니다.
마로솔은 SMPL → GMR → Humanoid 흐름으로 이를 패키지 지원합니다. SMPL은 3D 인체 형상/자세를 모델링하는 대표적인 파라메트릭 인체 모델로, 유튜브 영상에서 사람 동작을 추출해 로봇 모션 데이터로 변환하는 것이 가능합니다. 별도의 모션 캡처 장비 없이 영상만으로 고품질 시연 데이터를 쌓을 수 있다는 뜻이죠. 발 끌림이나 지면 관통 같은 아티팩트도 최소화됩니다.
마로솔에는 애지봇 휴머노이드 외에 유비테크, 유니트리, 레인보우로보틱스 등 다양한 국내외 휴머노이드 로봇이 입점되어 있지만, 연구의 핵심은 "내 연구 목표에 맞게 환경이 연결되는가"입니다.
| 제조사 | ROS / 개발 환경 | 시뮬레이션 / 모델 | 연구 확장성 포인트 |
|---|---|---|---|
| AgiBot (X2 Ultra) | AimDK 공식 문서 제공, ROS 2.0(Fast DDS 2.10) 호환 | 표준 URDF 시뮬레이션 모델 제공, Isaac Sim·MuJoCo 지원 | ROS2 기반 개발 문서와 시뮬레이션 연결 구조가 비교적 분명해, 연구용 개발 환경을 구축하기 좋음 |
| Unitree (G1 등) | 공식 GitHub에서 ROS/ROS2 관련 패키지와 개발 리포지토리 다수 공개 | MuJoCo, Isaac Gym, Isaac Lab 계열 리포지토리 공개 | 오픈소스 공개 범위가 넓어, 직접 개발하고 확장하는 연구실에 유리한 편 |
| Rainbow Robotics (RB-Y1) | 공식 Python/C++ SDK 제공 | MuJoCo 기반 시뮬레이터 제공 | SDK와 시뮬레이터는 공개돼 있지만, ROS 통합은 공식 문서상 향후 지원 예정으로 안내돼 있어 현재 시점에서는 ROS2 중심 연구 환경과는 구분해서 보는 것이 정확함 |
| UBTECH (Walker / Walker S) | Walker는 ROS 기반 소프트웨어 정보 공개, Walker S는 ROSA 2.0, Tele-operation, AIOT 중심으로 소개 | Walker는 URDF + Gazebo 기반 정보 공개, 별도로 Walker Virtual Simulation 제공 | 연구 확장성보다는 산업 적용과 운영 시나리오가 더 강하게 드러나는 편이라, 연구용 도입 시에는 개발 공개 범위와 활용 목적을 모델별로 따로 확인하는 것이 좋음 |
마로솔을 통해 도입하시면 애지봇 X2 울트라뿐만 아니라 다양한 휴머노이드를 목적에 맞게 최저가로 도입할 수 있으며, 다음의 서비스가 제공됩니다.
- 🛡️A/S 1년 1+1 보증: 기본 보증 외 1년 추가. 국내 상주 엔지니어 대응.
- 🎮텔레오퍼레이션 장비 지원: Meta Quest3 + 마스터 암 환경 구성.
- ⚙️초기 연구 환경 세팅: ROS2, LeRobot, Isaac Sim/MuJoCo 연동.
- 💡기술 자문: 알고리즘 방향 및 1:1 전문 컨설팅.
- 🎬Sim-to-Real / Retargeting 교육: 모션 변환부터 실로봇 배포까지 지원.
이 글을 읽은 분들이 아래의 포스팅을 좋아합니다
지금 이 로봇 가격 협의 가능!
회원님, 지금 문의하시면 도입 조건에 따라 추가 할인이 있을 수 있어요 💡