










휴머노이드 모방학습 데이터 수집, 시간 단축 미들웨어 등장
2분11173
사실 로봇을 '가르치는' 시간보다 가르칠 데이터를 모으는 시간이 훨씬 깁니다. 수십 개의 관절, 여러 대의 카메라, VR 장비, 그리고 모방학습 모델이 먹어야 할 수백 건의 시연 데이터를 연결하고, 모으고, 정리하는 일이 선행돼야 하니까요.
피지컬 AI와 VLA(Vision-Language-Action) 모델 시대로 들어선 지금, 휴머노이드 연구의 진짜 경쟁력은 '얼마나 빠르게, 얼마나 깨끗한 시연 데이터를 쌓느냐'에서 갈립니다. 빅웨이브로보틱스가 휴머노이드 모방학습 미들웨어 솔링크 데이터 매니저를 만든 이유가 여기에 있어요. 개발을 직접 주도한 CTO 송준봉 님께 8가지를 직접 물었습니다.

▶먼저 영상으로 보고 싶다면? 데이터 매니저 시연 영상 보기 →
사실 휴머노이드는 한 대의 로봇이 아니라, 여러 시스템이 동시에 살아 움직이는 환경에 가깝습니다. VR에서 들어오는 손 동작, 그걸 받아 움직이는 관절, 로봇이 보는 카메라 등 이 모든 데이터가 같은 시간 기준으로 맞물려야 학습에 쓸 수 있는 데이터가 됩니다.
결국 데이터 매니저는 단순한 연결 도구가 아니에요. 흩어진 장비들을 '모방학습이 가능한 하나의 환경'으로 바꿔주는 토대입니다. 휴머노이드 연구실의 출발점이 여기서 결정된다고 봐도 무방합니다.
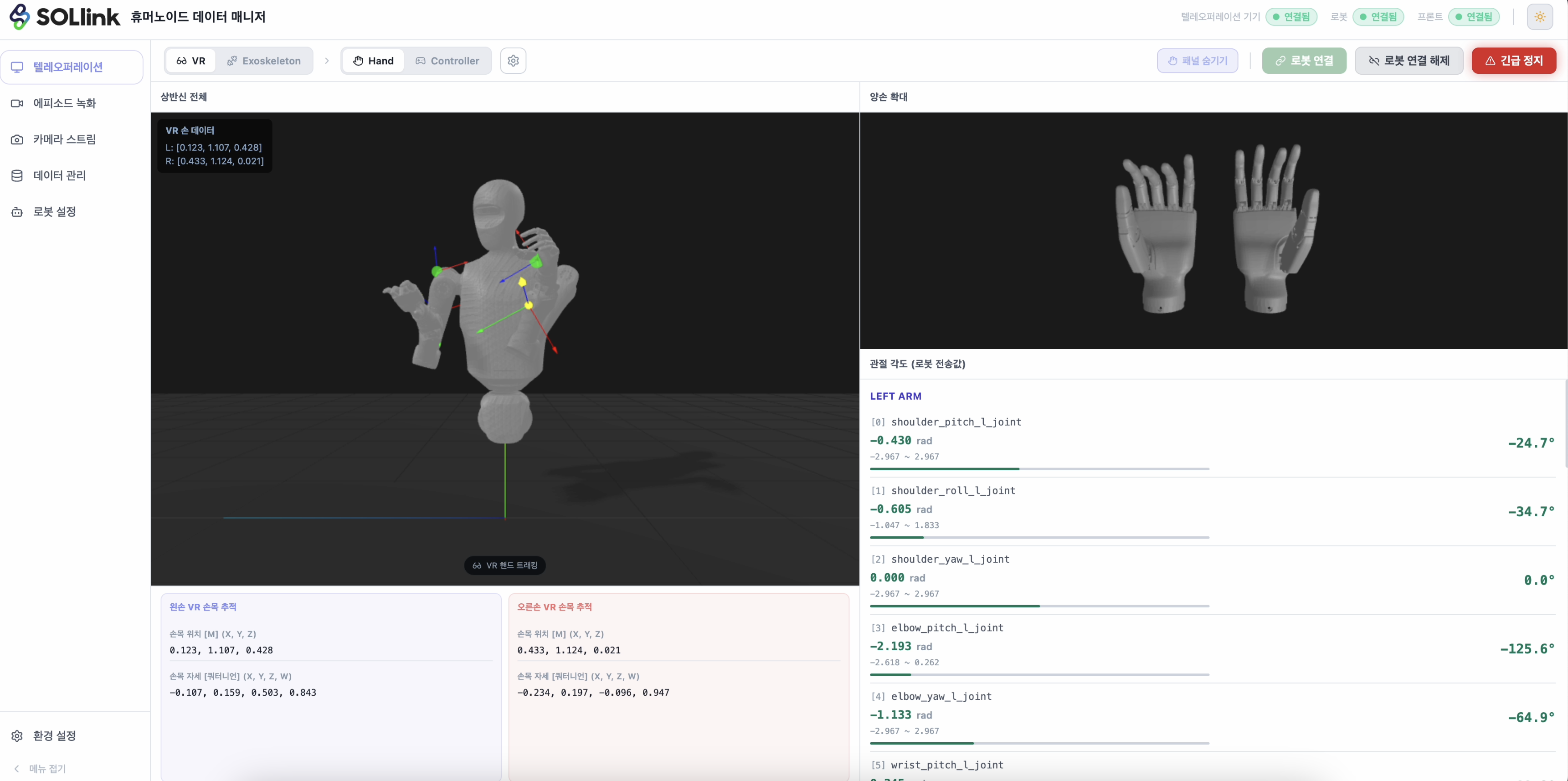 데이터 매니저 화면 캡쳐본
데이터 매니저 화면 캡쳐본통신 브릿지는 VR 장비·로봇·카메라처럼 서로 다른 프로토콜을 쓰는 장비를 한 채널로 묶어주는 연결 계층입니다. 연구자가 이 두 가지를 직접 짜는 건, 데이터 분석가가 본업 전에 데이터베이스 서버를 직접 설치하고 OS 패치까지 하는 셈입니다.
미들웨어가 없는 연구실의 하루를 따라가 보면 이렇습니다. 정작 하고 싶었던 본 연구는 시작도 못한 채, 인프라 작업에만 하루가 다 소진되는 풍경이에요.
연구자가 정작 하고 싶었던 일, "어떤 작업을 시연시키고, 어떤 모델 구조로 학습시킬까"는 하루가 다 끝나도 시작하지 못합니다.
다기종 휴머노이드를 운영하는 R&D 조직이라면 이 비용은 곱으로 늘어납니다. Walker e, Agibot X2, Unitree, Robotis 등 기종마다 별도의 코드베이스, 별도의 운영자, 별도의 학습 파이프라인이 생기죠. 미들웨어 자체 개발에만 6개월이 걸리는 연구실이 적지 않은 이유가 여기 있습니다.
 휴머노이드 애지봇 X2로 텔레오퍼레이션 중인 성균관대학교 대학원생
휴머노이드 애지봇 X2로 텔레오퍼레이션 중인 성균관대학교 대학원생마로솔 전문가가 연구실 조건에 맞게 솔링크 도입을 직접 제안해 드려요.
② VR 텔레오퍼레이션 (Teleoperation) — Meta Quest VR 헤드셋 입력이 IK로 변환되어 로봇 관절로 전달. 3D 시각화 패널에서 실시간 디버깅.
③ 카메라 스트림 (Stream Validation) — 로봇 시점 영상을 수집하는 그 순간 실시간 표시. 학습용 데이터 품질을 현장에서 즉시 검증.
④ 에피소드 녹화 & 관리 — 시작/정지 버튼만으로 카메라·관절·VR 입력이 같은 시간 기준으로 묶여 저장됩니다.
그리고 데이터 매니저의 가장 결정적인 차별점이 한 가지 더 있어요.
이 부분이 다기종 휴머노이드를 운영하는 조직에 특히 중요합니다. 운영자 교육 비용, 코드 유지보수 비용, 신규 기종 도입 리드타임이 모두 줄어들거든요. Walker e로 익힌 워크플로 그대로 Agibot X2를 운영할 수 있고, 다음에 Unitree를 도입해도 동일합니다.
사용은 생각보다 단순합니다. 전체 흐름을 한 줄로 보시면 이렇습니다.
로봇 타입 선택→② IP 등록
네트워크 연결→③ 토픽 프로필
수집 항목 정의→④ 브릿지 연결
디바이스 활성화→⑤ 준비 완료
실험 시작
환경 설정 화면에서 로봇 타입과 IP를 등록하고, 어떤 데이터를 모을지 토픽 프로필을 만듭니다. 사이드바에서 디바이스를 선택해 브릿지에 연결하면 그게 끝입니다. 며칠 걸리던 준비 과정이, 몇 번의 클릭으로 줄어듭니다. 코드 한 줄 쓰지 않고요.
특히 '토픽 프로필' 개념이 중요합니다. 어떤 카메라의 어떤 해상도, 어떤 관절의 어떤 값, 어떤 VR 입력, 이 세 가지를 하나의 프리셋으로 묶어두면, 다음 실험에서는 프로필만 불러오면 됩니다. 시연 데이터를 수백 건 쌓는 작업의 반복 비용이 극적으로 떨어지는 지점이 바로 여기예요. 연구실 멤버 누가 와서 실험을 이어가도 동일한 환경에서 출발할 수 있습니다.
관련 키워드: #노코드 #토픽프로필 #브릿지연결 #환경설정
먼저 시연 흐름부터 짚으면, 연구자가 Meta Quest VR 헤드셋을 착용하고 손을 움직이면, 솔링크 미들웨어가 손 동작을 IK로 변환해 Agibot X2의 손 관절로 보냅니다. 화면 안에서는 3D로 시각화된 휴머노이드가 같은 동작을 따라 하고, 손 추적 패널과 관절 디버그 정보가 로봇 상태를 실시간으로 보여줍니다.
그리고 여기서 에피소드 녹화 화면을 보시면요.
기술적으로 가장 까다로운 부분이 밀리초 단위의 시간 동기화예요. 카메라 영상과 관절값의 타임스탬프가 어긋나면, 모방학습 모델은 "어떤 장면을 보고 어떤 행동을 했는가"의 인과관계를 학습할 수 없습니다. 데이터 매니저는 이 동기화를 자동으로 잡아주기 때문에, 연구자는 '데이터가 정확한가'가 아니라 '어떤 작업을 시연할까'에만 집중할 수 있어요.
VR 텔레오퍼레이션부터 에피소드 녹화까지 한 번에 확인해보세요.
정확하게 핵심을 짚어주셨어요. 휴머노이드 연구에서 정말 중요한 건 따로 있어요. 로봇이 '얼마나 잘 움직였는가'가 아니라, '무엇을 보고 그렇게 움직였는가'입니다.
로봇 시점의 카메라 영상은 단순한 모니터링 화면이 아니에요. 나중에 모방학습 모델이 그대로 입력으로 받아들일 데이터 자체입니다. 잡음이 끼거나, 각도가 어긋나거나, 관절값과 시간이 미세하게 어긋나면 그 에피소드는 학습에 쓸 수 없는 '폐기 데이터'가 됩니다.
수백 건을 다 모은 뒤 나중에 "데이터 한 통이 다 폐기"가 되는 사고를 이 한 화면이 막아주는 거죠. 데이터 매니저의 데이터 관리 탭에서는 쌓인 에피소드를 목록으로 정리해두고, 필요한 데이터셋을 다시 열어 그 순간의 이미지와 관절값을 나란히 확인할 수도 있어요. 학습 전 마지막 품질 점검까지 한 UI에서 끝납니다.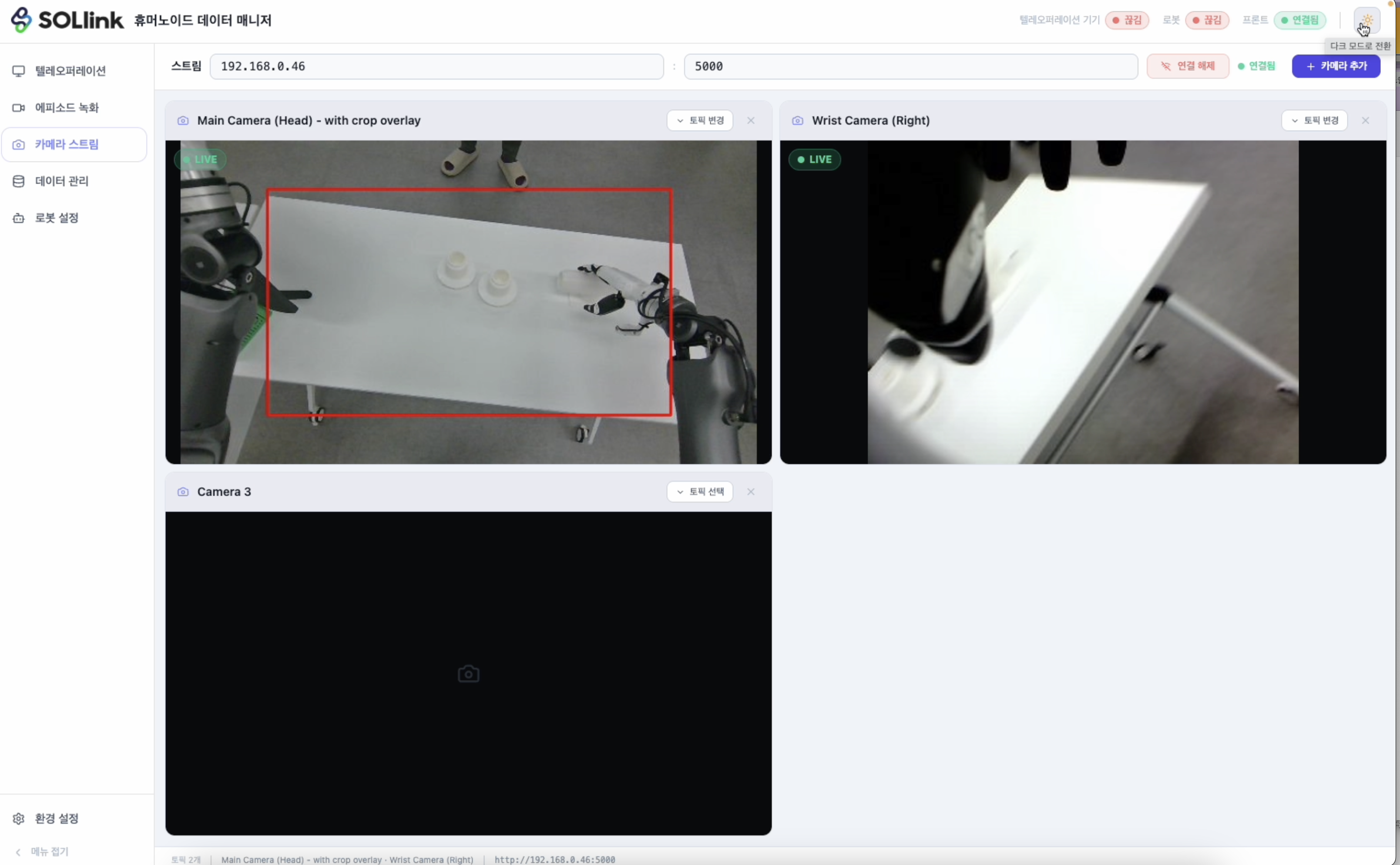
실제 도입 문의 패턴을 종합하면, 솔링크 데이터 매니저는 다음 네 가지 유형의 조직에서 가장 큰 효용을 냅니다. 이 글 보시는 분들도 본인 조직이 어디에 해당하는지 확인해 보시면 좋겠어요.
연구자가 본인의 본업 — 어떤 동작을, 어떤 방식으로 학습시킬 것인가 — 에만 집중할 수 있는 환경을 만드는 것. 그게 솔링크가 향하는 방향입니다. 수집은 끝이 아니라 시작이에요. 솔링크 데이터 매니저는 쌓인 에피소드를 한 목록으로 정리해주고, 필요한 데이터셋을 다시 열어 그 순간의 이미지와 관절값을 나란히 확인할 수 있게 합니다.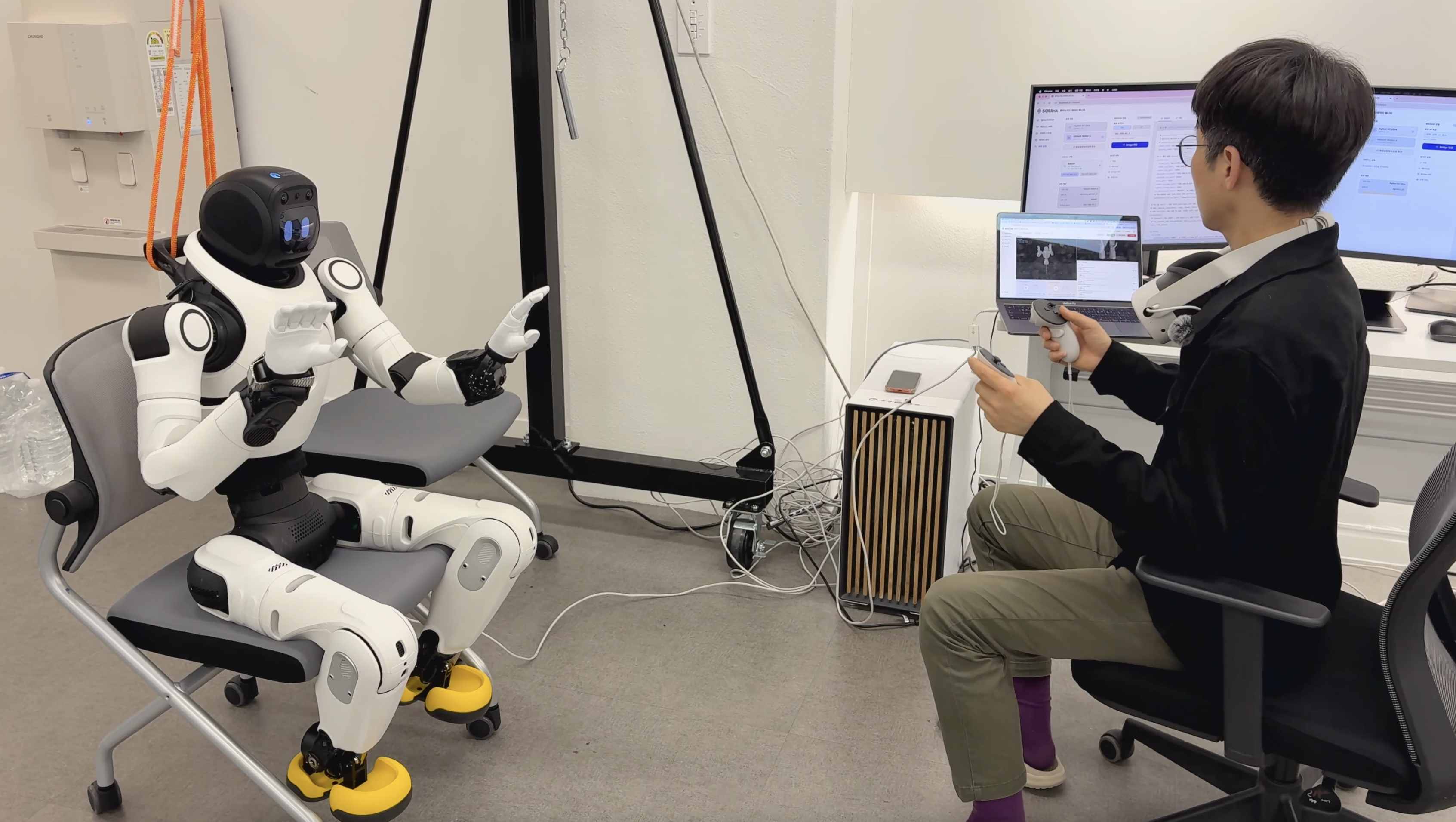
이 글을 읽은 분들이 아래의 포스팅을 좋아합니다




지금 이 로봇 가격 협의 가능!
회원님, 지금 문의하시면 도입 조건에 따라 추가 할인이 있을 수 있어요 💡