










세상에서 가장 빠른 사족보행로봇, 카이스트에서 탄생👏
카이스트 / 사족보행로봇 / 로봇개 / AI 강화학습
카이스트 기계공학과 연구팀이
제작한 사족 보행 로봇 '하운드(Hound)’가
100m 달리기로
기네스 세계기록으로 인정받았어요!👏
하운드는 얼마나 빨리 달렸길래
세계기록으로 인정받을 수 있었을까요?

하운드가 육상 트랙 위에서 달리는 모습 (사진=KAIST)
KAIST 동적로봇설계및제어연구실
에서 탄생한 하운드는 AI방법론 중 하나인
강화학습을 이용해 세계 신기록을
달성했다고 해요.😮
고속으로 달릴 수 있도록
강화학습을 진행한 후
이를 소화해낼 수 있는
액추에이터에도 변화를 줬는데요.

액추에이터 출력이 갖는
한계를 최대한 이용하기 위해
모터가 최대로 낼 수 있는 한계 토크와
속도 특성을 활용한 학습을 실시했어요.

또 대칭적인 걸음새를 통해
모터 출력을 고르게 분해했고,
보다 빠른 로봇 움직임을 위해
경량 발바닥도 맞춤형으로 제작했어요.
소프트웨어 면에서나
하드웨어 면에서 최고의 속도를 낼 수 있도록
설계된 하운드는 결과적으로
100미터를 19.87초 만에
주파했다고 합니다.👍
하운드는 실외 트랙뿐만 아니라
실내 러닝머신 위에서도
실험을 진행했는데요.
실험 결과 6.5m/s, 시속 23.4km에 달하는
주행 속도를 기록했어요.
하운드가 저 속도로
쫓아온다고 생각하니
갑자기 섬뜩하네요. 😱
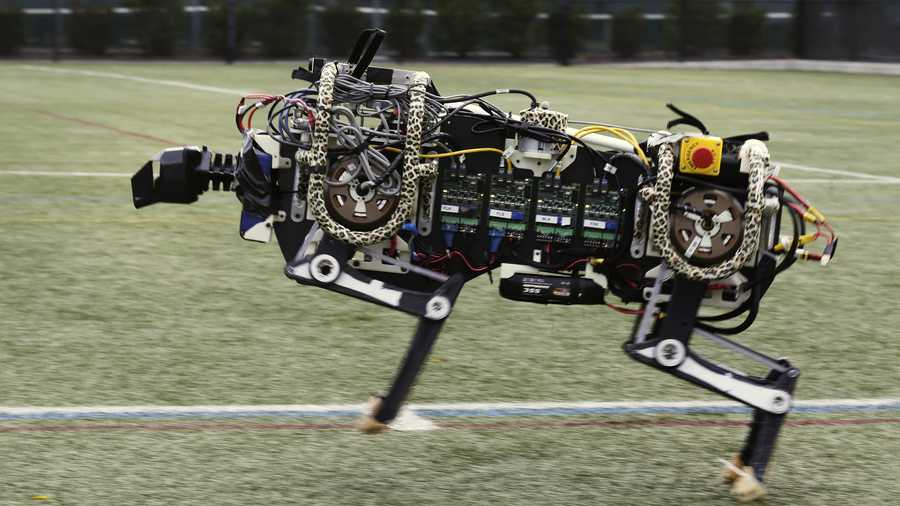
MIT가 개발한 치타2(Cheetah 2)
KIAST는 하운드의 주행 속도는
전기 모터 기반 사족 로봇 중 최고속도이며,
기존 메사추세츠 공과대학교(MIT)에서
개발한 치타2(Cheetah 2)가 세운
6.4m/s라는 기록을
뛰어넘는 성과라고 강조했어요.

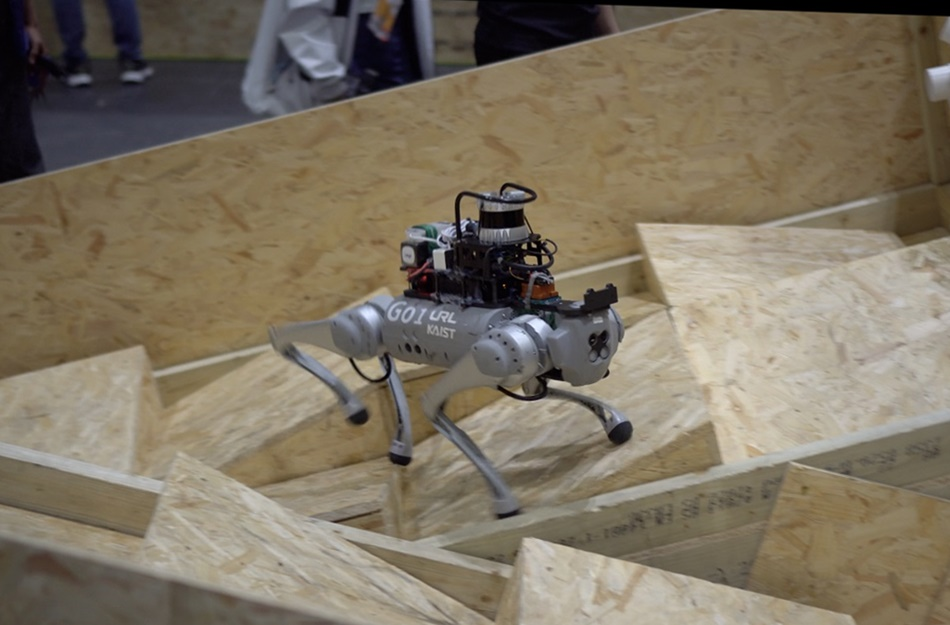
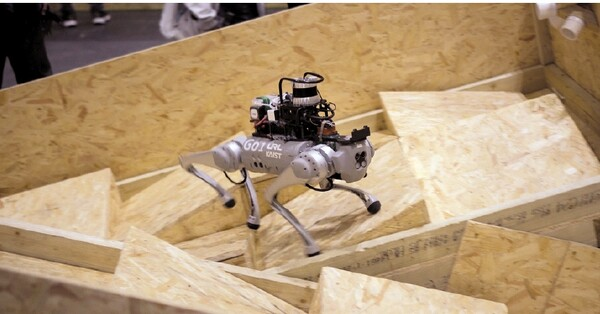
카이스트 자율보행 로봇이 사족로봇 자율보행 경진대회 결승전을 치르고 있다. (사진=QRC)
카이스트가 MIT를 사족보행로봇으로
이긴 사례는 이번이 처음이 아니죠.
올해 6월 국제 로봇·자동화 학술대회에서 주최한
‘사족로봇 자율보행 경진대회'에선
카이스트 연구팀이
MIT를 큰 점수 차이로 꺾고
우승을 만끽했어요.🎉

카이스트 자율보행 로봇이 사족로봇 자율보행 경진대회 결승전 중 장애물에 발이 걸려 옮겨지고 있다. (사진=QRC)
대회에선 복잡한 지형과 장애물을
어느 국가 사족보행 로봇이
가장 빨리 통과하는가였어요.
카이스트는 우승한 비법으로
보행로봇 제어기
'드림워크(DreamWaQ)' 기술을
탑재했기때문이라고 밝혔어요.
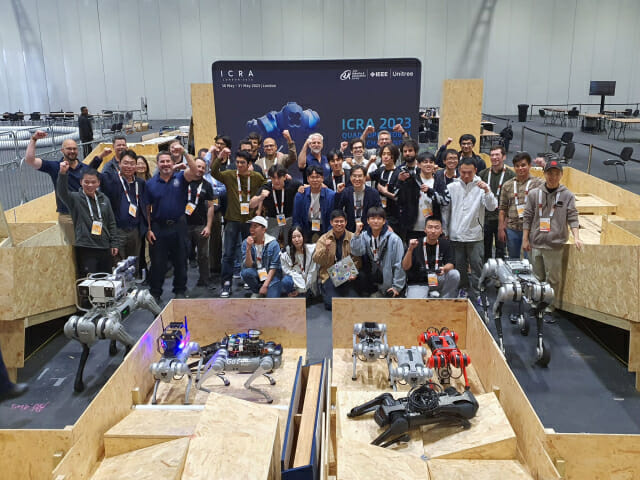
카이스트 드림스텝 팀이 대회에서 우승한 후 기념 사진을 찍고 있다. (사진=카이스트)
드림워크 기술은
로봇이 시각·촉각 센서 도움 없이도
블라인드로 보행이
가능하게 도와줄 수 있어요.
그 이유는 로봇 내부 관성 센서와
관절 센서 정보만으로 보행이
가능하기 때문인데요.
이런 기술은 카이스크에서
최초로 개발됐다고 합니다.🥳
드림워크 기술 또한
강화학습을 통해 구현할 수 있었는데요.
시뮬레이션을 통해
주변 환경을 해석하는 법과
추정된 상황을 바탕으로 실제 로봇을
제어하는 법을 학습한 거죠.
명현 카이스트 미래도시로봇연구실 교수. (사진=명현 교수)
카이스트의 명 교수
“국내 로봇 밀도가 세계 1위인만큼,
기술 수준도 상당 부분 앞서 있다”며
“IT 인프라를 잘 활용하고, AI, 알고리즘,
SW 등 우리 기업들 강점을 잘 활용하면
전 세계를 선도할 수 있을 것”이라고
말을 전하기도 했답니다.
MIT를 꺾고
세계를 놀래킨 카이스트가
선택한 사족보행 로봇이
궁금하시다면?
아래 버튼을 눌러
확인하실 수 있답니다.
👇👇👇
클릭하시면 로봇에 대해 더 자세히 보실 수 있습니다.