










솔루션에 사용된 로봇이 궁금하다면?

공정 레이아웃
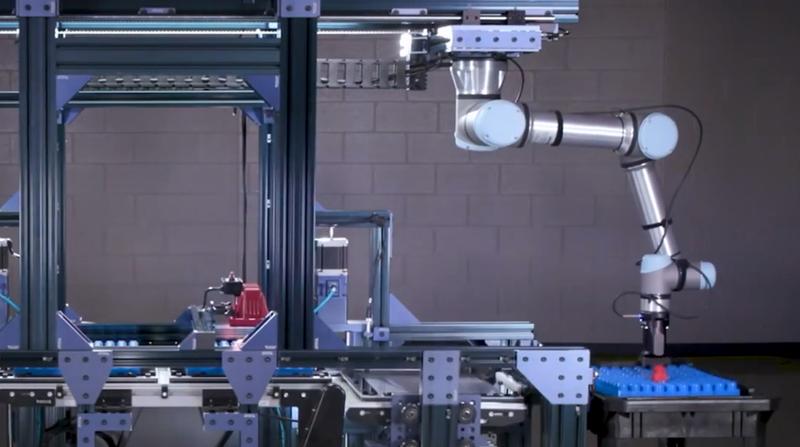
해당 솔루션은 기존의 생산공정에 적용이 손쉽고 변형이 쉬운 로봇자동화 솔루션을 개발을 위해 벤션의 모듈형 작업대를 활용해 모듈형 조립라인을 만든 사례입니다.
해당 솔루션은 중앙의 조립 작업대를 제외한 다른 작업대들을 연결하고 재배치하는 조립라인의 방향과 설정을 유연하게 변경할 수 있도록 설계되었습니다. 또한 벤션의 벨트 액츄이에터가 사용된 레인지 익스텐더와 다관절 로봇을 이용해 부품을 피킹 및 조립하고 순환식 팔레트로 부품을 손쉽게 투입하고 배출하는 조립라인을 개발하는데 성공했습니다.
구성요소
| 로봇 | 유니버셜 로봇 UR5e;
- 6축 다관절, 가반하중 5kg, 작업반경 850mm;
- 무게 20.6kg, 반복정밀도 +/- 0.03 mm |
|---|---|
| 주변기기 | 벤션 레인지 익스텐더;
비전카메라;
이동식 작업대 모듈;
컨트롤러: 벤션 MachineMotion 컨트롤러;
그리퍼; |
작업순서
| STEP 1. | 비전카메라로 부품 인식 |
|---|---|
| STEP 2. | 로봇이 부품 픽업 |
| STEP 3. | 팔레트로 이송된 부품과 조립 |
| STEP 4. | 로봇이 조립 완료된 작업물 픽업 |
| STEP 5. | 배출 |
특장점
손쉬운 설치와 변형이 가능한 모듈형 디자인
조립식 가구와 같이 모듈화 된 디자인과 쉬운 조립 방식
견고한 설계와 고품질의 하드웨어 사용으로 강한 내구성
작업대 연결과 재배치로 15분 이내에 공정 변경이 가능
레인지 익스텐더를 사용한 작업 가능영역 확대
다양한 분야에 적용 가능한 자동화된 조립 공정
내장 비전 솔루션과 순환식 팔레트로 부품 피킹, 조립, 배출 자동화
벤션의 URCap과 티치 팬던트를 통한 손쉬운 시스템 구현
맞춤형 PLC 박스나 추가적인 프로그래밍 없이 이용 가능
도입효과
| 주요지표 | 레인지 익스텐더와 다관절 로봇을 이용해 부품을 피킹 및 조립하고 순환식 팔레트로 부품을 손쉽게 투입하고 배출하는 조립라인 개발에 성공 |
|---|---|
| 도입기업 피드백 | 벤션의 엔지니어링적인 도움을 통해 기존 공정에 쉽게 투입이 가능한 조립라인 솔루션을 만들 수 있었습니다. |

※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
추천 솔루션

번거로운 수작업은 줄이고, 흐름은 더 매끄럽게! ASRS 기반 물류센터 입고 공정 자동화👌
다품종·다규격 박스가 혼재된 환경에서도 안정적인 입고 처리를 가능하게 하며, ASRS 전단 공정의 병목 해소와 운영 효율 극대화를 목표로 설계되었습니다.

알루미늄 바(Bar) 가공·후공정 통합 머신텐딩 자동화 솔루션
알루미늄 바(Bar) CNC 가공부터 세척, 후공정, 완제품 배출까지 전 공정을; 무인으로 연계한 머신텐딩 자동화 솔루션입니다. 가공 및 후공정 인력 30% 감축하였습니다.

로봇이 짓는 집?! 공간제작소, 모듈러 주택 창호 조립까지 자동화! 🛠️🏠
해당 도입사례는 KUKA 산업용 로봇과 자체 설계한 로봇 그리퍼, High Payload Track Motion을 결합하여 주택 창호 조립 자동화를 구현한 국내 최초의 솔루션입니다. 공간제작소는 건축 비용 절감 및 균일한 품질의 모듈러 주택 생산을 목표로 창호 조립 자동화 시스템을 도입하였습니다.

공정 레이아웃
해당 솔루션은 기존의 생산공정에 적용이 손쉽고 변형이 쉬운 로봇자동화 솔루션을 개발을 위해 벤션의 모듈형 작업대를 활용해 모듈형 조립라인을 만든 사례입니다.
해당 솔루션은 중앙의 조립 작업대를 제외한 다른 작업대들을 연결하고 재배치하는 조립라인의 방향과 설정을 유연하게 변경할 수 있도록 설계되었습니다. 또한 벤션의 벨트 액츄이에터가 사용된 레인지 익스텐더와 다관절 로봇을 이용해 부품을 피킹 및 조립하고 순환식 팔레트로 부품을 손쉽게 투입하고 배출하는 조립라인을 개발하는데 성공했습니다.
구성요소
| 로봇 | 유니버셜 로봇 UR5e;
- 6축 다관절, 가반하중 5kg, 작업반경 850mm;
- 무게 20.6kg, 반복정밀도 +/- 0.03 mm |
|---|---|
| 주변기기 | 벤션 레인지 익스텐더;
비전카메라;
이동식 작업대 모듈;
컨트롤러: 벤션 MachineMotion 컨트롤러;
그리퍼; |
작업순서
| STEP 1. | 비전카메라로 부품 인식 |
|---|---|
| STEP 2. | 로봇이 부품 픽업 |
| STEP 3. | 팔레트로 이송된 부품과 조립 |
| STEP 4. | 로봇이 조립 완료된 작업물 픽업 |
| STEP 5. | 배출 |
특장점
손쉬운 설치와 변형이 가능한 모듈형 디자인
조립식 가구와 같이 모듈화 된 디자인과 쉬운 조립 방식
견고한 설계와 고품질의 하드웨어 사용으로 강한 내구성
작업대 연결과 재배치로 15분 이내에 공정 변경이 가능
레인지 익스텐더를 사용한 작업 가능영역 확대
다양한 분야에 적용 가능한 자동화된 조립 공정
내장 비전 솔루션과 순환식 팔레트로 부품 피킹, 조립, 배출 자동화
벤션의 URCap과 티치 팬던트를 통한 손쉬운 시스템 구현
맞춤형 PLC 박스나 추가적인 프로그래밍 없이 이용 가능
도입효과
| 주요지표 | 레인지 익스텐더와 다관절 로봇을 이용해 부품을 피킹 및 조립하고 순환식 팔레트로 부품을 손쉽게 투입하고 배출하는 조립라인 개발에 성공 |
|---|---|
| 도입기업 피드백 | 벤션의 엔지니어링적인 도움을 통해 기존 공정에 쉽게 투입이 가능한 조립라인 솔루션을 만들 수 있었습니다. |
※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
솔루션에 사용된 로봇이 궁금하다면?
추천 솔루션
번거로운 수작업은 줄이고, 흐름은 더 매끄럽게! ASRS 기반 물류센터 입고 공정 자동화👌
다품종·다규격 박스가 혼재된 환경에서도 안정적인 입고 처리를 가능하게 하며, ASRS 전단 공정의 병목 해소와 운영 효율 극대화를 목표로 설계되었습니다.
알루미늄 바(Bar) 가공·후공정 통합 머신텐딩 자동화 솔루션
알루미늄 바(Bar) CNC 가공부터 세척, 후공정, 완제품 배출까지 전 공정을; 무인으로 연계한 머신텐딩 자동화 솔루션입니다. 가공 및 후공정 인력 30% 감축하였습니다.
로봇이 짓는 집?! 공간제작소, 모듈러 주택 창호 조립까지 자동화! 🛠️🏠
해당 도입사례는 KUKA 산업용 로봇과 자체 설계한 로봇 그리퍼, High Payload Track Motion을 결합하여 주택 창호 조립 자동화를 구현한 국내 최초의 솔루션입니다. 공간제작소는 건축 비용 절감 및 균일한 품질의 모듈러 주택 생산을 목표로 창호 조립 자동화 시스템을 도입하였습니다.