











솔루션에 사용된 로봇이 궁금하다면?



공정 레이아웃
프랑스 교육용 전문 로봇인 Niryo를 활용하여 볼펜 조립 프로그래밍 실습을 수행하고 로봇 활용에 대한 이해를 높일 수 있습니다.
구성요소
| 로봇 | Niryo Ned;
- 6축 다관절, 가반하중 0.3kg, 반복정밀도 ± 0.5mm, 작업반경 440mm, 중량 6.5Kg |
|---|---|
| 주변기기 | Niryo Conveyor Belt;
Niryo Vision Set;
볼펜 거치용 지그 |
작업순서
| STEP 1. | 볼펜 거치용 지그 투입 |
|---|---|
| STEP 2. | 볼펜 심 조립 |
| STEP 3. | 볼펜 심 고정 |
| STEP 4. | 글씨 쓰기 테스트 |
| STEP 5. | 볼펜 뚜껑 조립 |
| STEP 6. | 볼펜 색상에 따른 분류 |
특장점
로봇 교육을 위한 최적 솔루션
연구용 오픈 소스 로봇팔로 다양한 프로그래밍 방식 사용 가능 (ROS, Python, C++)
로봇을 직접 손으로 움직여 동작을 학습시키는 학습모드와 Blockly 기본의 쉬운 프로그램 가능
5종의 부속품을 교체해 가며 다양한 작업 처리 가능 (컨베이어, Vision 등)
0.5mm 의 정확성과 재현성 보장
도입효과
| 주요지표 | - |
|---|---|
| 도입기업 피드백 | 오픈 소스로 다양한 교육 프로그램을 실습 형태로 운영할 수 있어서 교육에 대한 효과가 매우 높습니다. |

※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
추천 솔루션

벤션의 디자인 플랫폼을 활용한 키네틱 미러
이 모듈형 프레임은은 4m 키네틱 조명 설치예술작품에 사용되는 전자기기와 거울을 설치하는데 사용되었습니다. 해당 프레임은 AI와 실시간 데이터를 활용해 인터넷과 이에 대한 사회적 통념에 관한 전시작품을 거치하기 위해 제작되었습니다. 벤션의 알루미늄 압출프레임이 이용된 해당 작품은 별도의 공구가 없이도 손쉽게 설치가 가능하며 벤션의 디자인서비스를 통해 빠르게 설계가 가능했습니다.
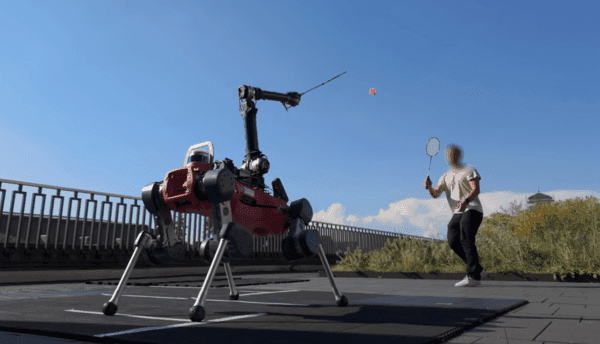
4족 보행 로봇 개, 이제 배드민턴까지 친다? 피지컬 인텔리전스(PI) 기계학습 대표 사례
본 도입사례는 스위스 ETH 취리히에서 개발한 4족 보행 로봇 ANYmal-D를 통해 고도화된 피지컬 인텔리전스(Physical Intelligence, PI) 기반 스포츠 로봇 기술을 구현한 사례입니다. ANYmal-D는 강화학습을 통해 사람과 실제 배드민턴 랠리를 주고받을 수 있는 인지형 로봇으로, 외부 센서 없이 온보드 센서만으로 셔틀콕의 궤적을 인식하고, 전신을 활용해 전략적으로 움직이며 민첩한 플레이를 수행합니다. 이 프로젝트는 단순한 자동화를 넘어, 로봇이 동적인 환경에서 스스로 판단하고 반응하는 '상황 대응형 자동화' 기술의 실증 사례로 주목받고 있습니다.

제조공장에 도입된 AMR 물류로봇의 활약 ✨ 폐자재 1톤도 신속하게 해결한 물류자동화 (KUKA KMP 1500P 물류로봇 2대)
빅웨이브로보틱스(마로솔)에서 공간제작소 내 롤러 및 폐자재 운반을 위해 물류로봇 KUKA KMP 1500P가 설치된 사례입니다. KMP 1500P를 도입하여 최대 1톤의 폐자재를 약 1.2km 구간 왕복 자동 주행하고, 최대 1톤의 고하중 롤러를 자동으로 운반하는 시스템을 구현했습니다. 또한 KMP 1500P에 탑재된 센서를 통해 고하중 자재를 안전하게 운반할 수 있는 무인 시스템을 구축하였습니다.


공정 레이아웃
프랑스 교육용 전문 로봇인 Niryo를 활용하여 볼펜 조립 프로그래밍 실습을 수행하고 로봇 활용에 대한 이해를 높일 수 있습니다.
구성요소
| 로봇 | Niryo Ned;
- 6축 다관절, 가반하중 0.3kg, 반복정밀도 ± 0.5mm, 작업반경 440mm, 중량 6.5Kg |
|---|---|
| 주변기기 | Niryo Conveyor Belt;
Niryo Vision Set;
볼펜 거치용 지그 |
작업순서
| STEP 1. | 볼펜 거치용 지그 투입 |
|---|---|
| STEP 2. | 볼펜 심 조립 |
| STEP 3. | 볼펜 심 고정 |
| STEP 4. | 글씨 쓰기 테스트 |
| STEP 5. | 볼펜 뚜껑 조립 |
| STEP 6. | 볼펜 색상에 따른 분류 |
특장점
로봇 교육을 위한 최적 솔루션
연구용 오픈 소스 로봇팔로 다양한 프로그래밍 방식 사용 가능 (ROS, Python, C++)
로봇을 직접 손으로 움직여 동작을 학습시키는 학습모드와 Blockly 기본의 쉬운 프로그램 가능
5종의 부속품을 교체해 가며 다양한 작업 처리 가능 (컨베이어, Vision 등)
0.5mm 의 정확성과 재현성 보장
도입효과
| 주요지표 | - |
|---|---|
| 도입기업 피드백 | 오픈 소스로 다양한 교육 프로그램을 실습 형태로 운영할 수 있어서 교육에 대한 효과가 매우 높습니다. |
※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
솔루션에 사용된 로봇이 궁금하다면?
추천 솔루션
벤션의 디자인 플랫폼을 활용한 키네틱 미러
이 모듈형 프레임은은 4m 키네틱 조명 설치예술작품에 사용되는 전자기기와 거울을 설치하는데 사용되었습니다. 해당 프레임은 AI와 실시간 데이터를 활용해 인터넷과 이에 대한 사회적 통념에 관한 전시작품을 거치하기 위해 제작되었습니다. 벤션의 알루미늄 압출프레임이 이용된 해당 작품은 별도의 공구가 없이도 손쉽게 설치가 가능하며 벤션의 디자인서비스를 통해 빠르게 설계가 가능했습니다.
4족 보행 로봇 개, 이제 배드민턴까지 친다? 피지컬 인텔리전스(PI) 기계학습 대표 사례
본 도입사례는 스위스 ETH 취리히에서 개발한 4족 보행 로봇 ANYmal-D를 통해 고도화된 피지컬 인텔리전스(Physical Intelligence, PI) 기반 스포츠 로봇 기술을 구현한 사례입니다. ANYmal-D는 강화학습을 통해 사람과 실제 배드민턴 랠리를 주고받을 수 있는 인지형 로봇으로, 외부 센서 없이 온보드 센서만으로 셔틀콕의 궤적을 인식하고, 전신을 활용해 전략적으로 움직이며 민첩한 플레이를 수행합니다. 이 프로젝트는 단순한 자동화를 넘어, 로봇이 동적인 환경에서 스스로 판단하고 반응하는 '상황 대응형 자동화' 기술의 실증 사례로 주목받고 있습니다.
제조공장에 도입된 AMR 물류로봇의 활약 ✨ 폐자재 1톤도 신속하게 해결한 물류자동화 (KUKA KMP 1500P 물류로봇 2대)
빅웨이브로보틱스(마로솔)에서 공간제작소 내 롤러 및 폐자재 운반을 위해 물류로봇 KUKA KMP 1500P가 설치된 사례입니다. KMP 1500P를 도입하여 최대 1톤의 폐자재를 약 1.2km 구간 왕복 자동 주행하고, 최대 1톤의 고하중 롤러를 자동으로 운반하는 시스템을 구현했습니다. 또한 KMP 1500P에 탑재된 센서를 통해 고하중 자재를 안전하게 운반할 수 있는 무인 시스템을 구축하였습니다.