











공정 레이아웃
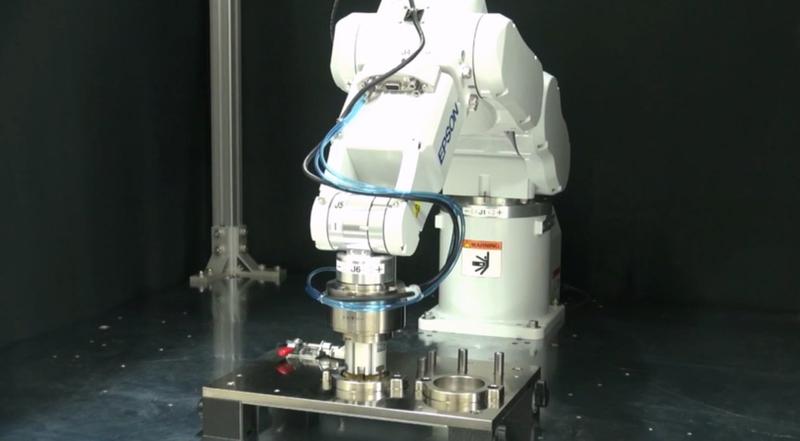
이 로봇은 Epson C4 로봇과 FT(Force-Torque)센서를 활용하여 자동차 부품을 공차가 타이트한 핀으로 고정하는 작업을 자동화한 조립자동화 솔루션입니다.
공차가 타이트 하더라도 외력을 감지하여 위치를 찾고 부품의 파손이나 훼손없이 부드럽게 삽입 작업이 가능합니다.
자동차 부품 중 고정 핀을 삽입하는 작업을 자동화 하기위해 진행하였습니다.
구성요소
| 로봇 | EPSON C4 (6축 다관절, 가반하중 4kg(정격 1kg), 최대 동작영역 600mm, 무게 27kg
반복정밀도 : ± 0.02 mm) |
|---|---|
| 주변기기 | SMC 3 핑거 공압 그리퍼 ;
6축 FT(Force-Torque) 센서 S250 (고강성, 고감도) (정격하중 250N/18Nm, 분해능 0.1N/0.003Nm
측정자유도 힘성분: X,Y,Z / 모멘트 성분: Fx,Fy,Fz 6방향);
작업 셀;
로봇 베이스 ;
부품 거치대 및 고정 지그 |
작업순서
| STEP 1. | 하부 부품을 피킹하여 작업 위치에 안착 |
|---|---|
| STEP 2. | 고정 클램프로 작업물 고정 |
| STEP 3. | 연결 핀을 피킹하여 삽입 |
| STEP 4. | 상부 부품을 피킹하여 연결 핀 위치에 맞춰 회전하면서 삽입 |
특장점
정밀한 삽입 작업 수행
0.1N/0.003Nm도 감지 가능한 FT 센서와 높은 반복 정밀도를 활용하여 미크론 수준의 공차에도 정밀한 삽입 작업 가능
삽입하려는 핀의 위치 오차, 경사 등도 힘이 가해지는 방향을 감지하여 보정 가능
정밀한 힘 감지를 통해 삽입/조립 작업시 부품 파손 방지
부품간 형상 오차가 있더라도 적절한 힘을 가감하여 삽입 가능
컴팩트한 설치
컴팩트한 로봇 형상으로 인한 설치/작업 공간 최소화
빠른 작업 속도로 택타임 최소화
최대 관절 속도 720deg/s로 빠른 작업 수행 가능
품질보증으로 안심!
1년간 무상보증 (Warranty) 제공
도입효과
| 주요지표 | 자동차 부품 핀 삽입 작업 인력 감축 |
|---|---|
| 도입기업 피드백 | 핀 삽입 작업의 경우 공차가 10 미크론 수준으로 공차가 매우 타이트하여 사람이 작업할 때도 빡빡한 경우가 있어 조립이 쉽지 않아 자동화 도입을 미뤄왔었는데, 드림의 솔루션을 통해 자동화 도입이 가능할 수 있었습니다. |

※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
솔루션에 사용된 로봇이 궁금하다면?

추천 솔루션

캠 샤프트 머신의 제품 로딩/언로딩 자동화로 생산성 향상에서 인건비 절감까지 달성했어요 📈
캠 샤프트 밴딩 머신의 제품 로딩·언로딩 자동화 솔루션입니다.; 작업자의 골격계 질환 위험을 줄이고, 24/7 작업으로 생산성 극대화를 달성하였습니다.

야스카와 산업로봇 + 스티로폼 자동 안착까지?! 한국앤컴퍼니 배터리 팔레타이징 자동화 사례🔋🤖
한국앤컴퍼니 팔레타이징 솔루션은 생산량 증가와 작업 인력 감소를 최우선으로 합니다. 기존 1대의 팔레타이저만으로 구성된 라인을 철거한 뒤, 2라인으로 분기 및 2대의 팔레타이저를 구성하여 생산 CAPA를 확보하였고, 기존 수작업으로 진행되던 스티로폼 / 합판 안착을 자동화하여 작업자의 개입 요소를 줄여 2개의 라인을 한명의 작업자가 관리합니다.
.gif&w=3840&q=75)
조립자동화&휴머노이드 인케이싱
비전 시스템 기반 볼트 체결 및 품질검사와 휴머노이드를 활용한 인케이싱 공정을 통합한 자동화 시스템으로 불량 제품 유출 방지 및 생산성을 향상하였습니다.