












공정 레이아웃
공정 개요
빅웨이브로보틱스(마로솔)에서 공간제작소 내 롤러 및 폐자재 운반을 위해 물류로봇 KUKA KMP 1500P가 설치된 사례입니다. KMP 1500P를 도입하여 최대 1톤의 폐자재를 약 1.2km 구간 왕복 자동 주행하고, 최대 1톤의 고하중 롤러를 자동으로 운반하는 시스템을 구현했습니다. 또한 KMP 1500P에 탑재된 센서를 통해 고하중 자재를 안전하게 운반할 수 있는 무인 시스템을 구축하였습니다.
프로젝트 배경 및 목적
자율주행 로봇을 통한 무인 운반 자동화
단순 반복 작업의 로봇 수행
고하중 제품 싣고 다양한 센서를 통한 안정적인 주행
솔링크를 이용한 원격 제어와 모니터링
구성요소
| 로봇 | KUKA KMP 1500 2대 |
|---|---|
| 주변기기 | 로봇 자동 충전대 2개 ; 로봇 수동 충전기 1개 ; KUKA 로봇용 서버용 하드웨어 PC 1대 ; KUKA 로봇용 서버용 라이선스 1개 ; SOLlink 태블릿 제어기 2개 ; SOLlink 서버 1개 ; 로봇 운반 대차 5개 ; 대차용 스테이션 10개 |
작업순서
| STEP 1. | 출발지역(상차) 내 대차 적재 |
|---|---|
| STEP 2. | SOLlink(태블릿)을 통한 작업 명령 |
| STEP 3. | 로봇 리프트를 이용하여 출발 지역에서 대차를 상차 |
| STEP 4. | 목표 지역으로 대차 운반 |
| STEP 5. | 로봇 리프트를 이용하여 대차 하차 |
| STEP 6. | 작업 외 시간대 자동 충전 설정 |
| STEP 7. | 충전 |
| STEP 8. | 사전 설정된 배터리 Level 회복 후 작업 대기 |
| STEP 9. | 로봇 간 교차 시 우선권이 있는 로봇에 경로 양보 후 교차 주행(우선권 부여 기준 : 작업 명령 순서) |
특장점
편의성 부분
솔링크를 이용한 로봇 실시간 모니터링
솔링크(태블릿)을 사용한 간편한 로봇 조작
공장 내 와이파이 활용으로 공간의 제약 없이 편리한 접근
자동 충전 기능을 이용한 로봇 배터리 유지
360도 라이더와 3D 카메라 등을 이용한 안전성
로봇 센서 기반 안전 운반
3D 카메라 & LiDAR 등 다양한 센서 탑재
장애물/사람 감지 시 자동 정지
자재 낙하 방지 기능
단순 작업 자동화
이동 자동화로 작업 효율 향상
잉여 시간 활용으로 작업 시간 극대화
도입효과
| 주요지표 | 자재 운반 자동화 → 인력 개입 없이 하루 80회 이상 자동 운반, 약 작업 효율 2배 향상
1톤 고하중 자재 안정 운반 → 3D 카메라와 LiDAR 센서를 통한 안전 감지 및 충돌 방지 완비
자율주행 경로 최적화 → 1.2km 구간 내 정해진 경로를 자동 주행, 로봇 간 교차 시 우선권 제어로 안전 확보
근로자 근무 환경 개선 → 반복적 고하중 운반 업무 제거로 작업자 피로도 감소 및 공정 집중도 향상
공정 효율 향상 및 가동률 안정화 → 야간·비근무 시간대에도 자동 충전 후 무인 운반 연속 수행 가능 |
|---|---|
| 도입기업 피드백 | 고하중 자재를 직접 옮기던 시절엔 안전사고 우려와 피로 누적이 많았는데,
지금은 로봇이 운반을 대신해줘서 훨씬 안정적이에요. |

※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
솔루션에 사용된 로봇이 궁금하다면?

추천 솔루션
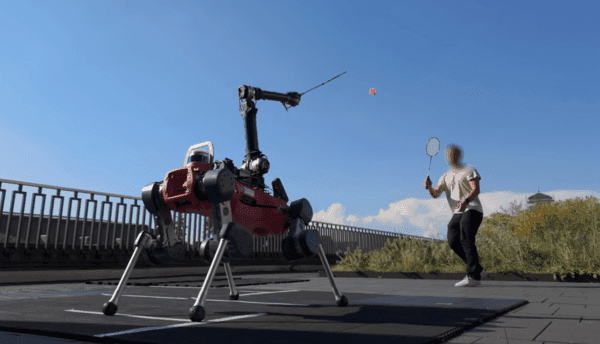
4족 보행 로봇 개, 이제 배드민턴까지 친다? 피지컬 인텔리전스(PI) 기계학습 대표 사례
본 도입사례는 스위스 ETH 취리히에서 개발한 4족 보행 로봇 ANYmal-D를 통해 고도화된 피지컬 인텔리전스(Physical Intelligence, PI) 기반 스포츠 로봇 기술을 구현한 사례입니다. ANYmal-D는 강화학습을 통해 사람과 실제 배드민턴 랠리를 주고받을 수 있는 인지형 로봇으로, 외부 센서 없이 온보드 센서만으로 셔틀콕의 궤적을 인식하고, 전신을 활용해 전략적으로 움직이며 민첩한 플레이를 수행합니다. 이 프로젝트는 단순한 자동화를 넘어, 로봇이 동적인 환경에서 스스로 판단하고 반응하는 '상황 대응형 자동화' 기술의 실증 사례로 주목받고 있습니다.

로봇이 짓는 집?! 공간제작소, 모듈러 주택 창호 조립까지 자동화! 🛠️🏠
해당 도입사례는 KUKA 산업용 로봇과 자체 설계한 로봇 그리퍼, High Payload Track Motion을 결합하여 주택 창호 조립 자동화를 구현한 국내 최초의 솔루션입니다. 공간제작소는 건축 비용 절감 및 균일한 품질의 모듈러 주택 생산을 목표로 창호 조립 자동화 시스템을 도입하였습니다.

이커머스 물류센터 팔레타이징 자동화
제품 자동 분류 및 팔레타이징으로 물류센터 출하 처리 속도를 개선하였습니다.