











공정 레이아웃
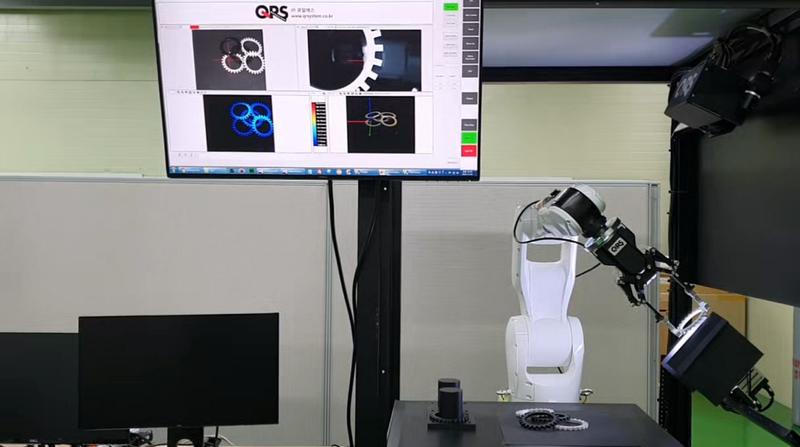
이 로봇은 QRS의 2D/3D 비전검사와 덴소 VS로봇을 활용하여 랜덤하게 놓인 기어를 찾고 기어형상 검사를 통해 양품과 불량품을 분류하는 분류자동화 솔루션입니다.
QRS에서 자체 개발된 비전을 활용하여 작업 현장 특성에 맞게 튜닝 및 커스터마이징이 가능하기 때문에 다양한 제품의 형상을 인식하여 정밀한 검사 작업을 수행할 수 있습니다.
작업물 Bin Picking 후 검사작업을 자동화 하기 위해 진행하였습니다.
*본 솔루션의 예상금액과 프로젝트 기간은 비전 솔루션에 한정된 내용(로봇과 주변기기 제외)임을 참고 부탁드립니다.
구성요소
| 로봇 | 덴소 VS-060 (6축 다관절, 가반하중 4kg, 최대 동작 영역 605mm, 무게 28kg,
반복정밀도 : ± 0.02 mm, 표준 사이클 타임 0.35초, 최대 툴 속도 9,390mm/s
방진방적/클린 타입 옵션 가능) |
|---|---|
| 주변기기 | 전기 그리퍼 ;
비전 시스템:
QRS Q3D-IS(근거리용) : 기어 위치 인식(3.2MP, 2048 X 1536 픽셀, 구조광 형식, 스캐닝 범위 : 176 X 132 ~ 706X529mm (면적 범위), 측정 거리 : 300/600/1200mm, 색상, 형상, 위치 인식 및 치수 측정 가능) ;
QRS Q2D : 치형 검사용(딥러닝 알고리즘 탑재, Alignment : 제품의 정렬 형태 검사 및 정렬 방향 인식 가능, Measurement : 제품의 형상, 길이, 용접 열영향부 두께 등 측정 가능, Inspection : 제품의 형상, 결함, 누락, 색상, 순서 등 검사 가능);
호환 로봇 브랜드;
현대, NACHI, EPSON, DENSO, YASKAWA, STAUBLI, FANUC, KUKA, UR 등 ;
작업 셀;
로봇 베이스 ;
검사 결과 디스플레이 모니터 (QRS) ;
작업물 분류 거치대 |
작업순서
| STEP 1. | 랜덤하게 쌓여 있는 기어 더미에서 피킹할 대상을 3D 비전으로 인식 |
|---|---|
| STEP 2. | 인식된 제품을 피킹 후 2D 비전을 통한 양품/불량품 검사 수행 |
| STEP 3. | 검사 결과에 따라 배출 위치로 언로딩 |
특장점
신속하고 정확한 분류 작업
최대 툴 속도 9m/s 달하는 산업용 로봇을 활용한 빠른 작업 성능
로봇 동작과 함께 동시에 비전 (위치) 인식 작업을 수행하여 사이클 타임 단축
빠르고 정밀한 비전 성능
복잡한 형상의 물체의 경우에도 신속하게 형상 및 위치 인식 가능 (3D)
미크론 단위의 치수도 측정 가능하여 정밀한 검사 수행 가능 (2D)
비전 전문가를 통한 비전 솔루션 구축
자체 비전 개발 역량을 보유하고 있어 현장 조건에 맞는 최적 대응 가능
하자보증 기간으로 안심
1년의 하자보증 (Warranty) 기간 부여
도입효과
| 주요지표 | 제품 품질 검사 및 분류 인력 감축
제품 품질 불량 비용 절감 및 고객 인지 품질 향상 |
|---|---|
| 도입기업 피드백 | 비전 검사 자동화 적용시 제품 및 환경 조건에 따라 오류가 많이 발생했으며, 신규 제품 추가시 대응이 매우 어려웠었는데 QRS의 경우 비전 전문 인력 보유로 현장 조건에 맞게 빠르게 대응해 주어서 결과에 대한 만족도가 높았습니다. |

※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
솔루션에 사용된 로봇이 궁금하다면?

추천 솔루션

👁️📦🤖 Vision 기반 식품 외박스 검사·로봇 팔레타이징 자동화 라인
본 시스템은 식품 공정 특성에 맞춘 비접촉 검사, 반복 작업 자동화, 중량 작업 제거를 통해 작업자의 부담을 줄이는 동시에, 출하 품질의 신뢰성과 물류 효율을 동시에 향상시키는 것을 목표로 합니다.
.png&w=3840&q=75)
자동차 부품 공장, 팔레타이징 로봇으로 출하 공정 자동화
자동차 부품 공장, 팔레타이징 로봇으로 출하 공정 자동화한 실제 사례 | 대동도어 도입기

AI 팔레타이징 + 오므론(omron) AMR 물류로봇으로 물류자동화 완성! 👏
해당 도입사례는 오므론 AMR 물류로봇과 AI 기반의 팔레타이징 시스템을 결합하여 물류 자동화를 구현한 솔루션 입니다. 고객사는 미래 경쟁력을 위해 인공지능을 접목한 물류 자동화 시스템을 도입하고, 비용 절감과 효율성을 극대화하기 위해 팔레타이징 및 물품 반송 자동화에 높은 관심을 보였습니다. 본 솔루션은 다양한 형태의 물품을 자율적으로 이동 및 적재하여 입출고 과정의 효율성과 정확성을 향상시키며, 작업자의 물리적 부담을 줄이고 안전성을 확보했습니다.