











공정 레이아웃
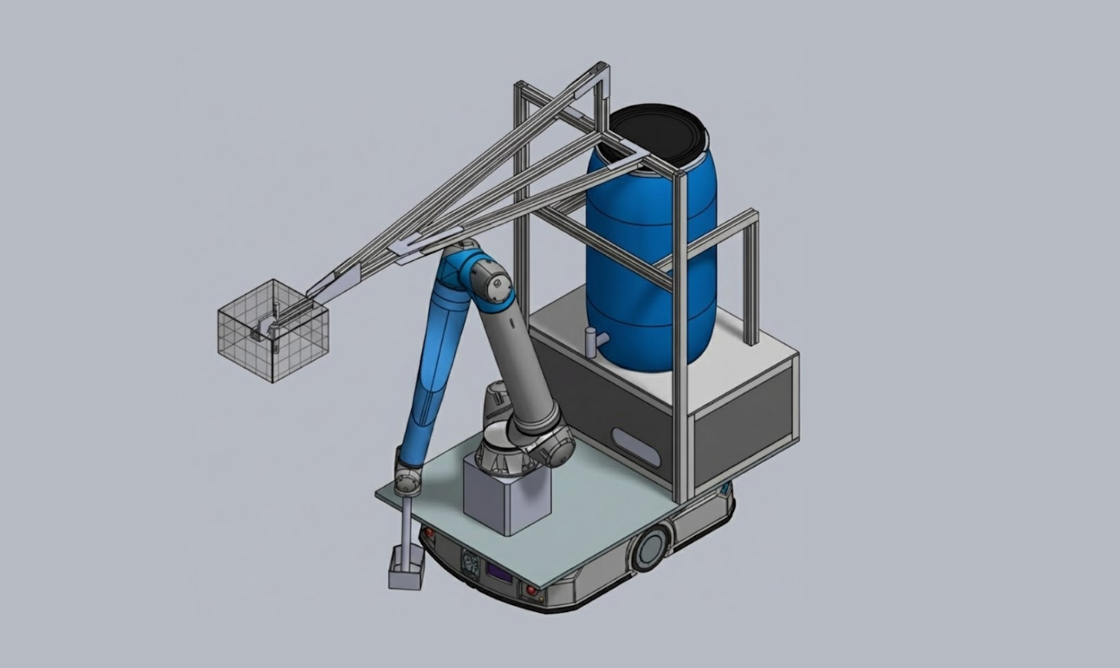
본 솔루션은 야외ㆍ고온ㆍ협소 환경에서도 안정적으로 운용 가능한 모바일 매니퓰레이터 (MoMa) 기반 자동화 및 중앙 관제 시스템입니다. 장입차 하부 회피 공간, 2D 비전 기반 주입구 인식, 옥상 및 보도블럭 주행 환경 등 특유의 열악한 조건을 고려한 로봇 선정ㆍ운영ㆍ관제까지 통합적으로 설계하여 안정성, 운영 효율, 확장성을 동시에 확보합니다.
구성요소
| 로봇 |
|
|---|---|
| 주변기기 | 2D Vision System;중앙 컨트롤 타워;클라우드 기반 서버;네트워크 인프라;다종 로봇 통합 관제 시스템 SOLlink |
작업순서
| STEP 1. | MoMa 관제 시스템에 작업명령 등록 |
|---|---|
| STEP 2. | SOLlink를 통해 로봇에 작업 할당 |
| STEP 3. | 로봇 상태 실시간 확인 (에러, 배터리, 이벤트, 탱크 보충 알람) |
| STEP 4. | 작업 진행률 및 예상 완료 시간 제공 |
특장점
- 야외ㆍ고온 환경 대응 로봇 운영
- 장입차 하부 통과 가능한 구조 설계
- 2D 비전 기반 작업 포인트 인식
- 다종ㆍ이종 로봇 통합 관제
- 단계별 확장 가능한 자동화 로드맵
- 중앙 컨트롤 타워 기반 무인 운영
도입효과
| 주요지표 | 작업 안정성 향상 위험 작업 구간의 인력 투입 최소화 로봇 운영 상태 및 이력 실시간 데이터화 설비 Down Time 최소화 향후 자동화 공정 확장 용이성 확보 |
|---|

※ 마로솔 내의 모든 콘텐츠를 무단으로 복사 및 재창작할 경우 부정경쟁방지법 및 저작권법에 위반될 수 있음을 밝힙니다.
추천 솔루션

제우스로봇을 활용한 제약 장비 시트지 제거 작업
이 적용사례는 제우스의 ZERO 산업용로봇을 이용해 제약 장비의 시트지를 제거하는 공정입니다. 로봇을 포함한 다양한 자동화 기술 이용해 반도체 및 제약 생산 현장과 같은 높은 품질 요구를 필요로 하는 곳까지 다양한 산업군에 적용 가능한 자동화 솔루션입니다.
로봇 모델
ZRA-0503P
스크랩

제조공장에 도입된 AMR 물류로봇의 활약 ✨ 폐자재 1톤도 신속하게 해결한 물류자동화 (KUKA KMP 1500P 물류로봇 2대)
빅웨이브로보틱스(마로솔)에서 공간제작소 내 롤러 및 폐자재 운반을 위해 물류로봇 KUKA KMP 1500P가 설치된 사례입니다. KMP 1500P를 도입하여 최대 1톤의 폐자재를 약 1.2km 구간 왕복 자동 주행하고, 최대 1톤의 고하중 롤러를 자동으로 운반하는 시스템을 구현했습니다. 또한 KMP 1500P에 탑재된 센서를 통해 고하중 자재를 안전하게 운반할 수 있는 무인 시스템을 구축하였습니다.
로봇 모델
KMP 1500
스크랩

고속 리니어 무빙 트랙(Rockwell MM LITE)을 활용한 혈액 검사 및 분류 이송
해당 솔루션은 고속 리니어 무빙 솔루션과 다관절 로봇, 비전 검사등을 활용하여 혈액 키트 검사 및 고속 운송/분류/적재를 종합한 공정입니다. 해당 솔루션은 검사 및 분류 작업 생산성 향상을 위해 진행되었습니다.
스크랩